LCD显示和光源扩展板冲突吗??
# Untitled - By: Administrator - Fri Apr 12 2024
import sensor, image, time
import display
from pyb import UART, Pin,Timer
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQVGA)
sensor.skip_frames(time = 2000)
lcd = display.SPIDisplay()
light = Timer(4, freq=50000).channel(1, Timer.PWM, pin=Pin("P7"))
light.pulse_width_percent(10) # 控制亮度 0~100
clock = time.clock()
while(True):
clock.tick()
lcd.write(sensor.snapshot())
print(clock.fps())
openmv4h plus mt9v034相机,报RuntimeError:Sensor control failed.
openmv4h plus mt9v034相机,上电启动有时候会报RuntimeError:Sensor control failed.
sensor.reset() # Reset and initialize the sensor.
sensor.set_pixformat(sensor.GRAYSCALE) # Set pixel format to RGB565 (or GRAYSCALE),BAYER
sensor.set_framesize(sensor.QQVGA) # Set frame size to QVGA (320x240),QQVGA2 (128160),QQVGA(160120)
sensor.set_vflip(True)
sensor.set_hmirror(False)
sensor.set_transpose(True)
sensor.set_auto_exposure(False,exposure_us=EXPS)
‘’‘
’‘’
pycharm可以调用openmv的摄像头吗
import sensor, time, pyb, ubinascii
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time=2000)
while True:
img = sensor.snapshot().compress(quality=70) # 压缩质量为70%
hex_data = ubinascii.hexlify(img).decode() # 转为十六进制字符串
print(hex_data) # 发送数据
pyb.delay(1000)
此代码放在openmv ide烧录
find_numbers历程进行数字识别,2s后显示没有找到相关属性?
LetNet Example
import sensor, image, time
sensor.reset() # Reset and initialize the sensor.
sensor.set_contrast(3)
sensor.set_pixformat(sensor.GRAYSCALE) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.VGA) # Set frame size to QVGA (320x240)
sensor.set_windowing((128, 128)) # Set 128x128 window.
sensor.skip_frames(time = 2000) # Wait for settings take effect.
sensor.set_auto_gain(False)
sensor.set_auto_exposure(False)
while(True):
img = sensor.snapshot()
# NOTE: Uncomment to detect dark numbers on white background
# img.invert()
out = img.find_number(roi=(img.width()//2-14, img.height()//2-14, 28, 28))
img.draw_rectangle((img.width()//2-15, img.height()//2-15, 30, 30))
if out[1] > 5: # Confidence level
print("Number: %d Confidence: %0.2f" %(out[0], out[1]))
报错提示
Traceback (most recent call last):
File "
AttributeError: 'Image' object has no attribute 'find_number'
MicroPython v1.9.4-4510-g23e8457de on 2018-06-29; OPENMV3 with STM32F765
Type "help()" for more information.
用保存视频的例程,在sd卡里的视频怎么是0字节大小?
@kidswong999 import sensor, image, time, mjpeg, pyb
RED_LED_PIN = 1
BLUE_LED_PIN = 3
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # or sensor.GRAYSCALE
sensor.set_framesize(sensor.QVGA) # or sensor.QQVGA (or others)
sensor.skip_frames(10) # Let new settings take affect.
clock = time.clock() # Tracks FPS.
pyb.LED(RED_LED_PIN).on()
sensor.skip_frames(30) # Give the user time to get ready.
pyb.LED(RED_LED_PIN).off()
pyb.LED(BLUE_LED_PIN).on()
m = mjpeg.Mjpeg("test1.mjpeg")
#mjpeg.Mjpeg(filename, width=Auto, height=Auto)创建一个mjpeg对象,
#filename为保存mjpeg动图的文件路径
print("You're on camera!")
for i in range(200):
clock.tick()
m.add_frame(sensor.snapshot())
#mjpeg.add_frame(image, quality=50)
#quality为视频压缩质量。
print(clock.fps())
m.close(clock.fps())
pyb.LED(BLUE_LED_PIN).off()
print("Done! Reset the camera to see the saved recording.")
测试的例程,重新上电还是一样0字节
运行测试的例程,openmv重新上电后,sd卡里的视频0字节大小,打不开?
import sensor, image, time, mjpeg, pyb
RED_LED_PIN = 1
BLUE_LED_PIN = 3
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # or sensor.GRAYSCALE
sensor.set_framesize(sensor.QVGA) # or sensor.QQVGA (or others)
sensor.skip_frames(10) # Let new settings take affect.
clock = time.clock() # Tracks FPS.
pyb.LED(RED_LED_PIN).on()
sensor.skip_frames(30) # Give the user time to get ready.
pyb.LED(RED_LED_PIN).off()
pyb.LED(BLUE_LED_PIN).on()
m = mjpeg.Mjpeg("test1.mjpeg")
#mjpeg.Mjpeg(filename, width=Auto, height=Auto)创建一个mjpeg对象,
#filename为保存mjpeg动图的文件路径
print("You're on camera!")
for i in range(200):
clock.tick()
m.add_frame(sensor.snapshot())
#mjpeg.add_frame(image, quality=50)
#quality为视频压缩质量。
print(clock.fps())
m.close(clock.fps())
pyb.LED(BLUE_LED_PIN).off()
print("Done! Reset the camera to see the saved recording.")
测试的例程,重新上电还是一样0字节
串口接收数据,程序只执行一下子,openmv直接卡死,报错
import sensor, image, time
from pyb import UART
sensor.reset() # Reset and initialize the sensor.
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
sensor.skip_frames(time = 2000) # Wait for settings take effect.
clock = time.clock() # Create a clock object to track the FPS.
uart = UART(3, 115200)
a=0
while(True):
clock.tick() # Update the FPS clock.
img = sensor.snapshot() # Take a picture and return the image.
print(clock.fps()) # Note: OpenMV Cam runs about half as fast when connected
# to the IDE. The FPS should increase once disconnected.
#code = 'A'
#print(code)
#uart.write(code)
if uart.any():
recieve = uart.readline().decode().strip()
print(recieve)
if recieve == 'L':
print("We win.")
a=a+1
print(a)
print("\n")
else:
print("No FOUND")
串口接收数据,程序只执行一下子,openmv直接卡死,报错
你的代码不对,if recieve == 'L':应该在if uart.any():里面。
import sensor, image, time
from pyb import UART
sensor.reset() # Reset and initialize the sensor.
sensor.set_pixformat(sensor.GRAYSCALE) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
sensor.skip_frames(time = 2000) # Wait for settings take effect.
clock = time.clock() # Create a clock object to track the FPS.
uart = UART(3, 115200)
a=0
while(True):
clock.tick() # Update the FPS clock.
img = sensor.snapshot() # Take a picture and return the image.
print(clock.fps()) # Note: OpenMV Cam runs about half as fast when connected
# to the IDE. The FPS should increase once disconnected.
#code = 'A'
#print(code)
#uart.write(code)
if uart.any():
recieve = uart.readline().decode().strip()
print(recieve)
if recieve == 'L':
print("We win.")
a=a+1
print(a)
print("\n")
else:
print("No FOUND")
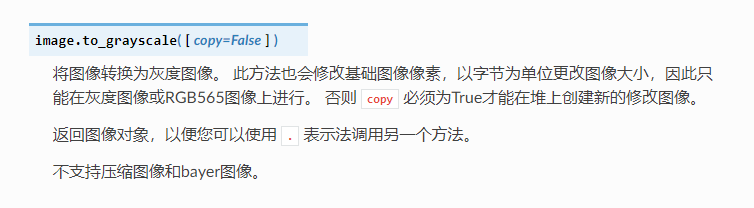
图像处理函数问题求解?
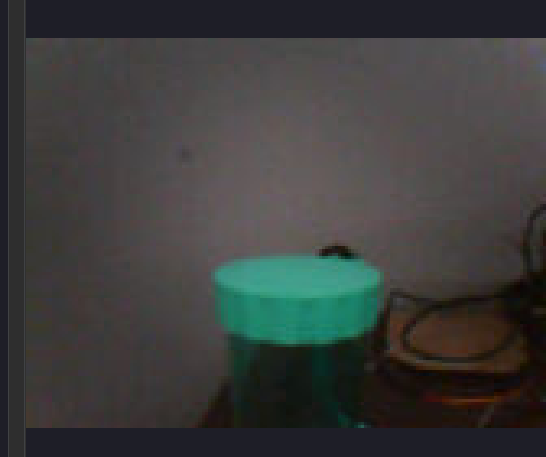
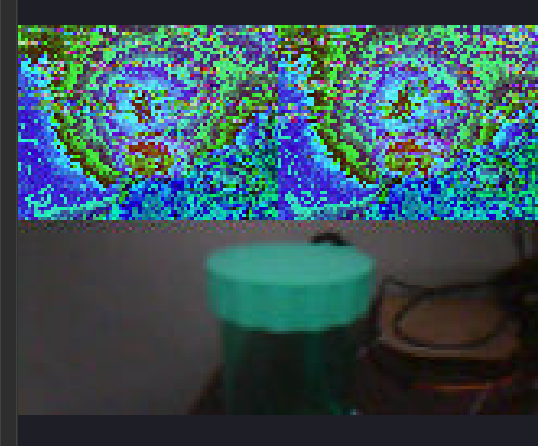
我使用如下函数,为什么得到的结果是这样的啊
使用前:
使用后:
代码如下:
import sensor, image, time
sensor.reset() # Reset and initialize the sensor.
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QQVGA) # Set frame size to QQVGA (160x120)
sensor.skip_frames(time = 2000) # Wait for settings take effect.
clock = time.clock() # Create a clock object to track the FPS.
while(True):
clock.tick() # Update the FPS clock.
img = sensor.snapshot()
# img这里是彩色
img = img.to_grayscale()
# img这里是灰色
print(clock.fps())
请问编译的时候为什么会出现'blob' object has no attribute 'pixel'?
import sensor, image, time
import car
from pyb import LED
from pyb import Pin
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # use RGB565.
sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed.
sensor.skip_frames(10) # Let new settings take affect.
sensor.set_auto_whitebal(False) # turn this off.
clock = time.clock() # Tracks FPS.
green_threshold = (31, 66, -34, -9, -2, 18)
def find_max(blobs): #寻找最大面积的球
max_size=0
for blob in blobs:
if blob[2]*blob[3] > max_size:
max_blob=blob
max_size = blob[2]*blob[3]
return max_blob
while(True):
clock.tick() # Track elapsed milliseconds between snapshots().
img = sensor.snapshot() # Take a picture and return the image.
blobs = img.find_blobs([green_threshold])
if blobs:
max_blob = find_max(blobs)
x_error = max_blob[5]-img.width()/2
for greenblord_threshold in blobs:
if greenblord_threshold.pixel() > 2000:
car.run(30-0.5*green_x_error,30+0.5*green_x_error)
elif greenblord_threshold.pixel() < 10000:
car.run(0,0)
else:
car.run(20,-20)