uart.write()与sensor.snapshot()和lcd.display()为什么不能同时使用?
-
import sensor, time, image, lcd, math,pyb from pyb import UART #RED_LED_PIN = 1 #BLUE_LED_PIN = 3 uart = UART(3, 115200) sensor.reset() sensor.set_contrast(3) sensor.set_gainceiling(16) sensor.set_framesize(sensor.HQVGA) # HQVGA最好,其次QVGA,QQVGA sensor.set_pixformat(sensor.GRAYSCALE) #注意人脸识别只能用灰度图哦 sensor.skip_frames(10) sensor.skip_frames(time = 5000) #等待5s face_cascade = image.HaarCascade("frontalface", stages=25) clock = time.clock() lcd.init() def face1(): uart.write("ok\r\n") print("ok") sensor.reset() sensor.set_contrast(3) sensor.set_gainceiling(16) sensor.set_framesize(sensor.HQVGA) # HQVGA最好,其次QVGA,QQVGA sensor.set_pixformat(sensor.GRAYSCALE) #注意人脸识别只能用灰度图哦 sensor.skip_frames(10) # Let new settings take affect. sensor.skip_frames(time = 5000) #等待5s while (True): img = sensor.snapshot() # 拍摄一张照片 lcd.display(sensor.snapshot()) objects = img.find_features(face_cascade, threshold=0.75, scale=1.35) #thresholds越大,匹配速度越快,错误率也会上升。scale可以缩放被匹配特征的大小。 for r in objects: img.draw_rectangle(r) #在找到的目标上画框,标记出来 if objects: for object in objects: fs=object[2]*object[3] if fs>=14884: print(fs) print(objects) break while(True): clock.tick() img = sensor.snapshot() #1 lcd.display(sensor.snapshot()) #2 这两行无论哪一行运行,串口都无法接收到数据 a='0' if uart.any(): a=uart.readline().decode() print(a) #pyb.delay(100) if a=='a': uart.write("a\r\n") #img = sensor.snapshot() face1() print("face1")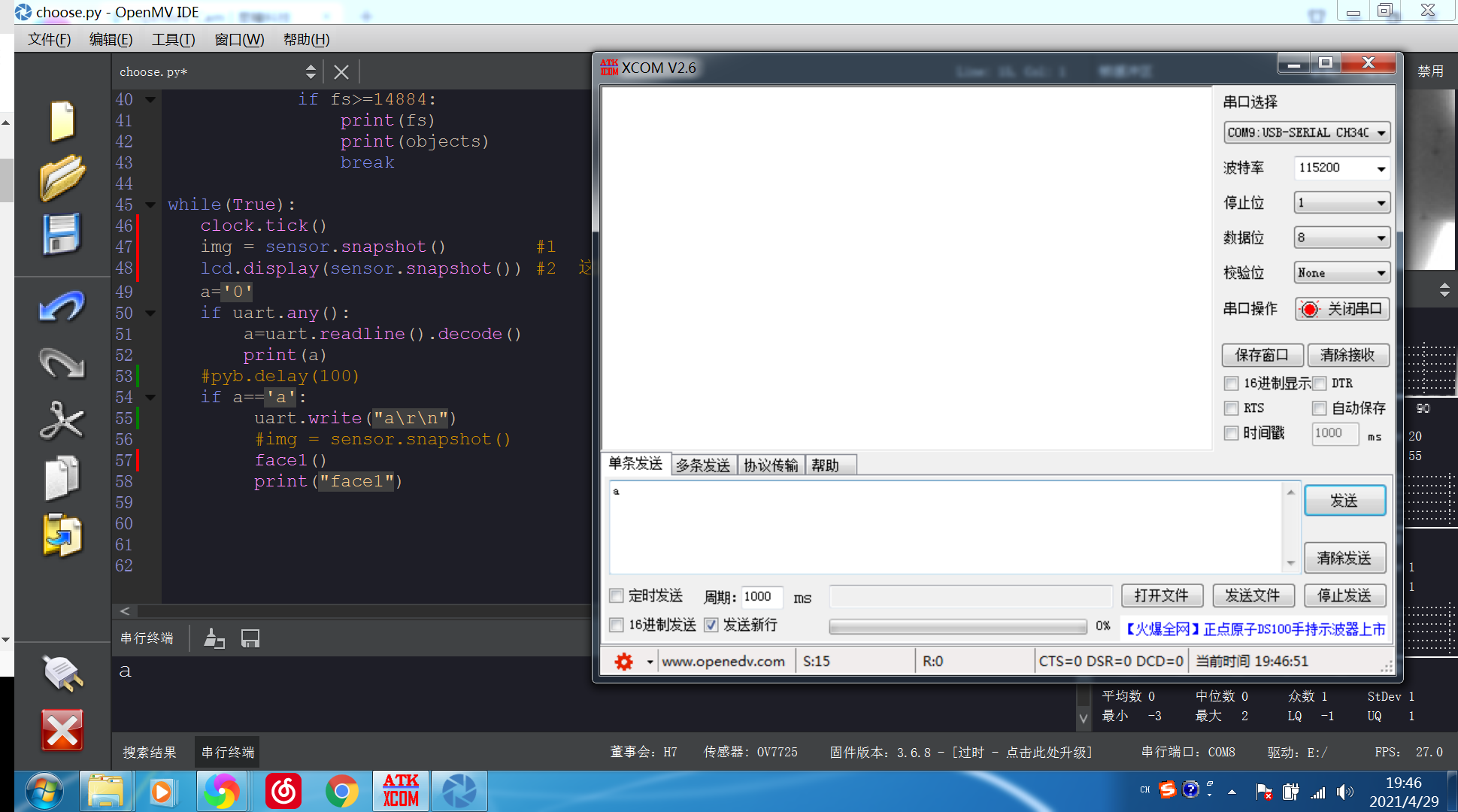
-
标记的两行中,只要存在任意一行就无法接收到数据,是芯片处理能力不够吗?我见lcd与串口3的管脚定义也并没有重复
-
我想做的项目需要openMV作为识别装置,识别不同东西给32发送不同指令,并通过代码写的逻辑使得两块单片机通过互相通信实现自主运行
-
根据你的图片,第一张和第二张图片收到数据了。第三张图片没有收到数据。是吗?
-
@kidswong999 是前两张没收到数据,最后一张收到了
-
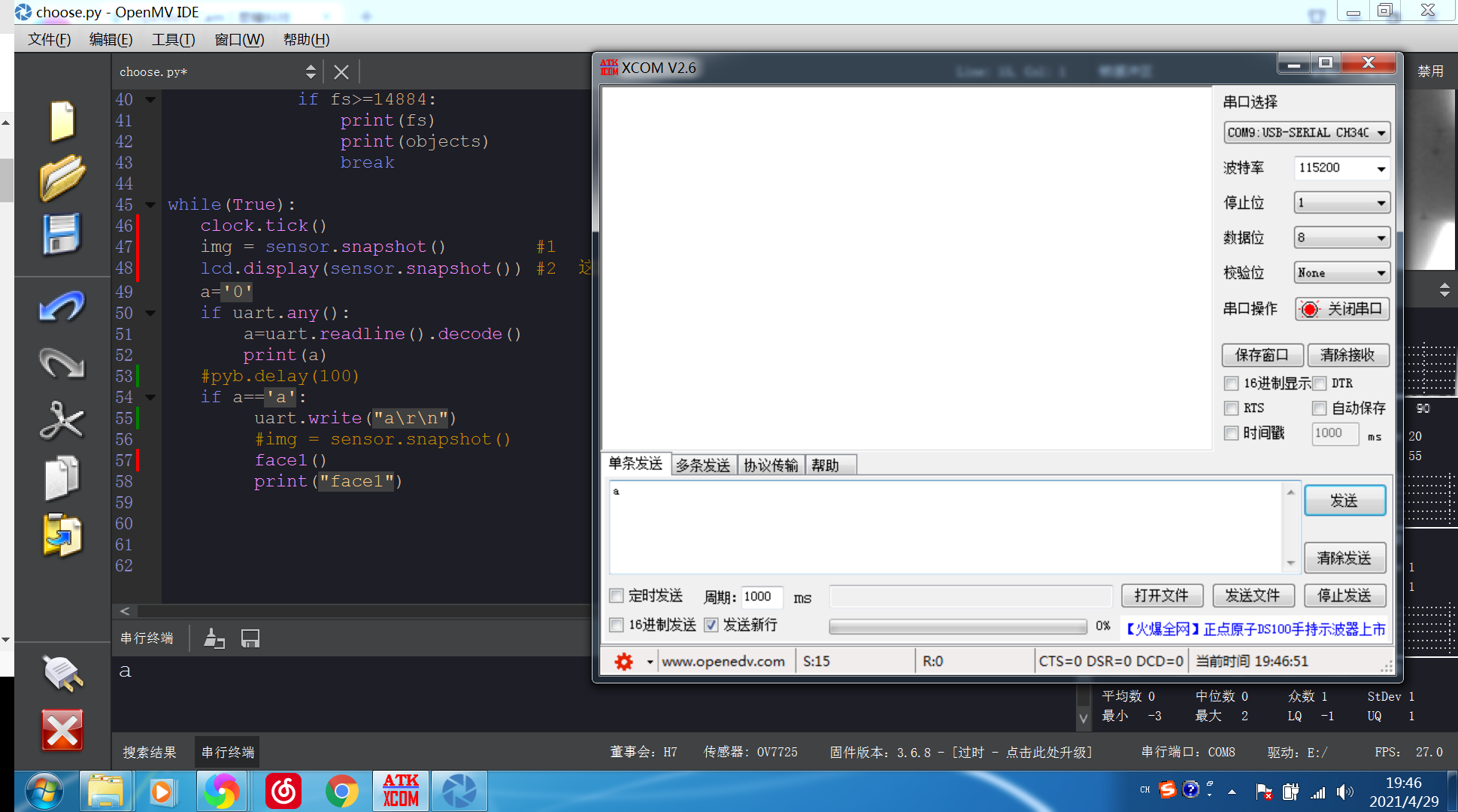
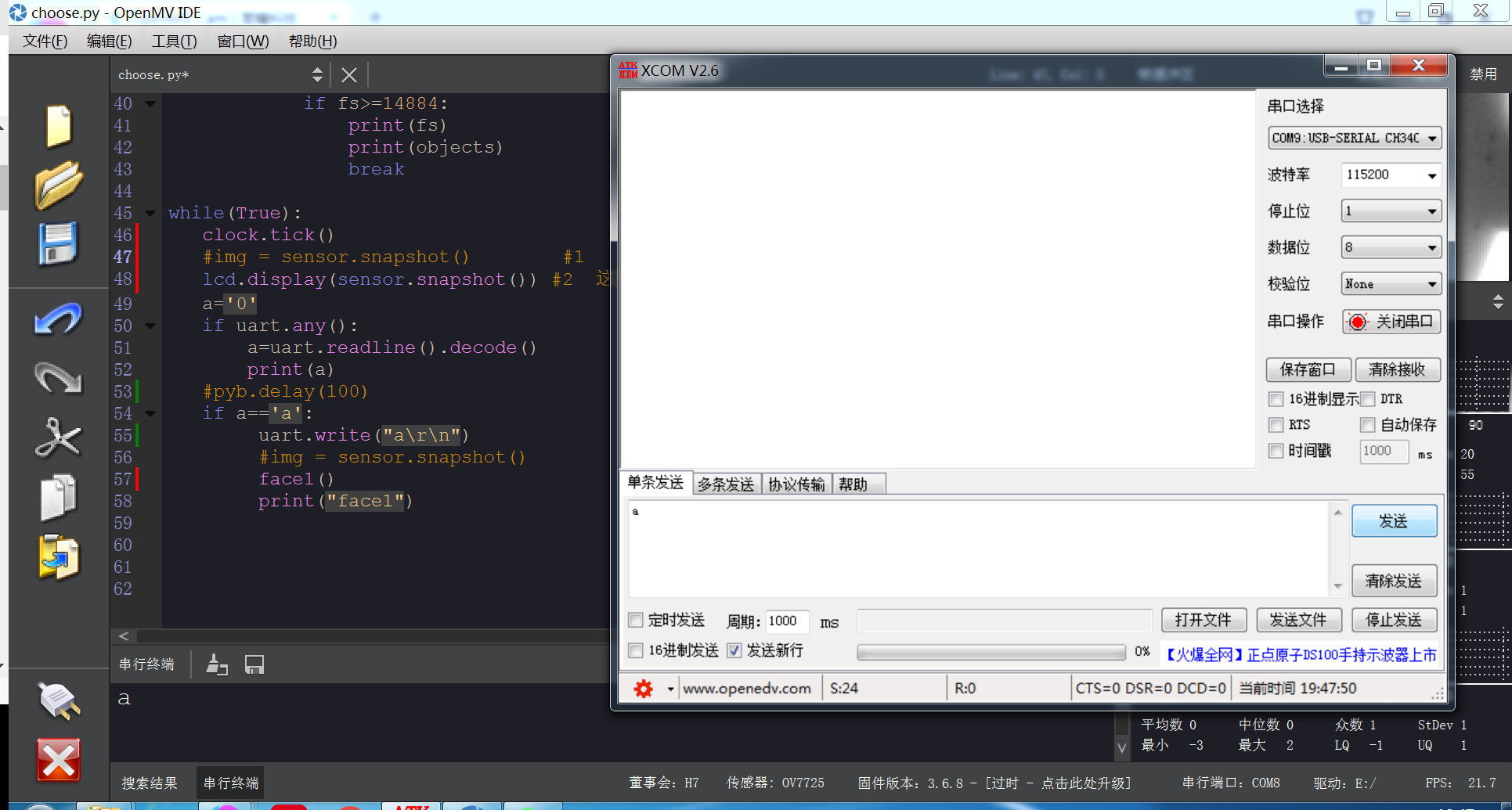
@kidswong999 我第一张是正常代码,无法接收到数据
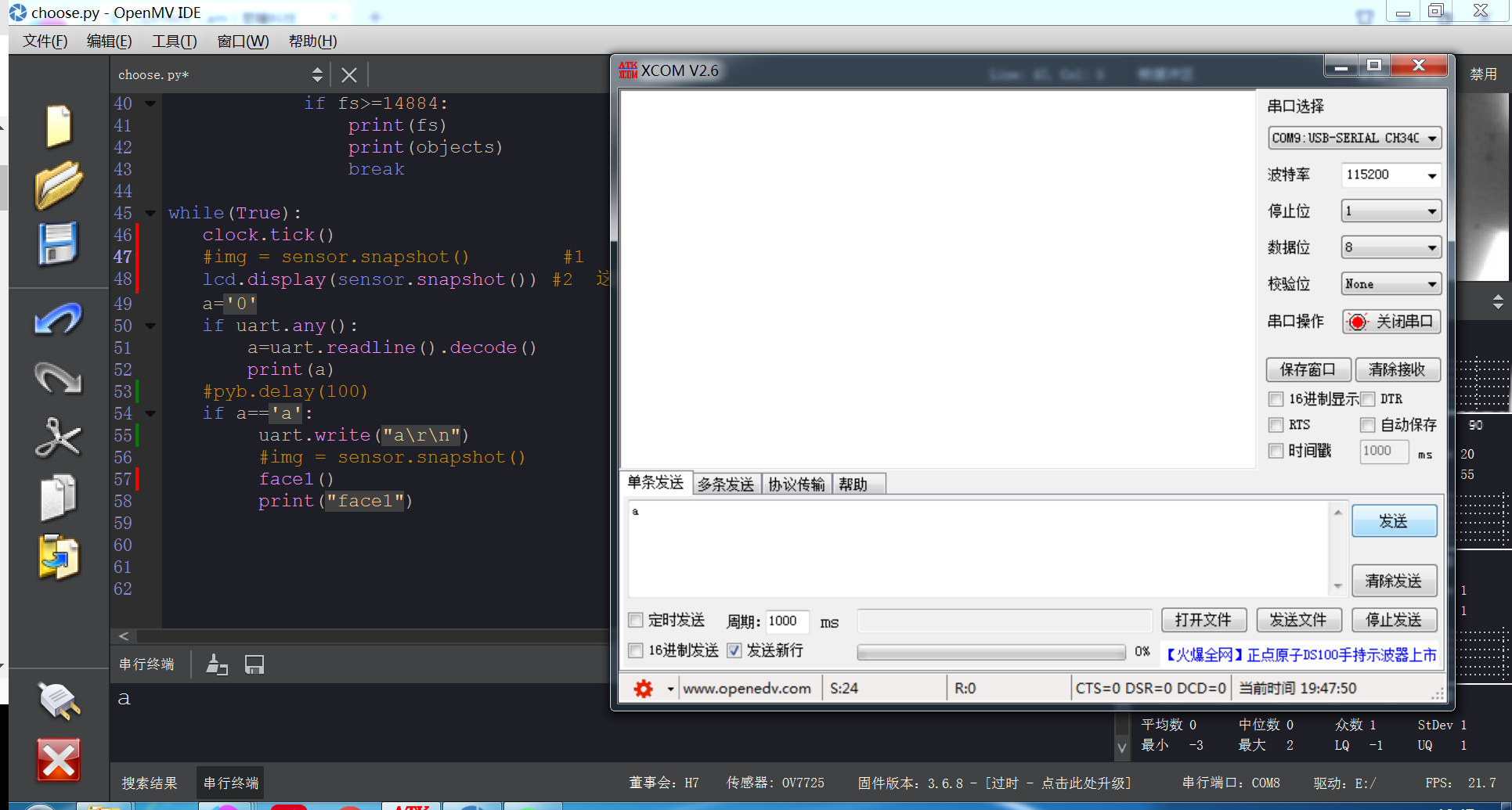
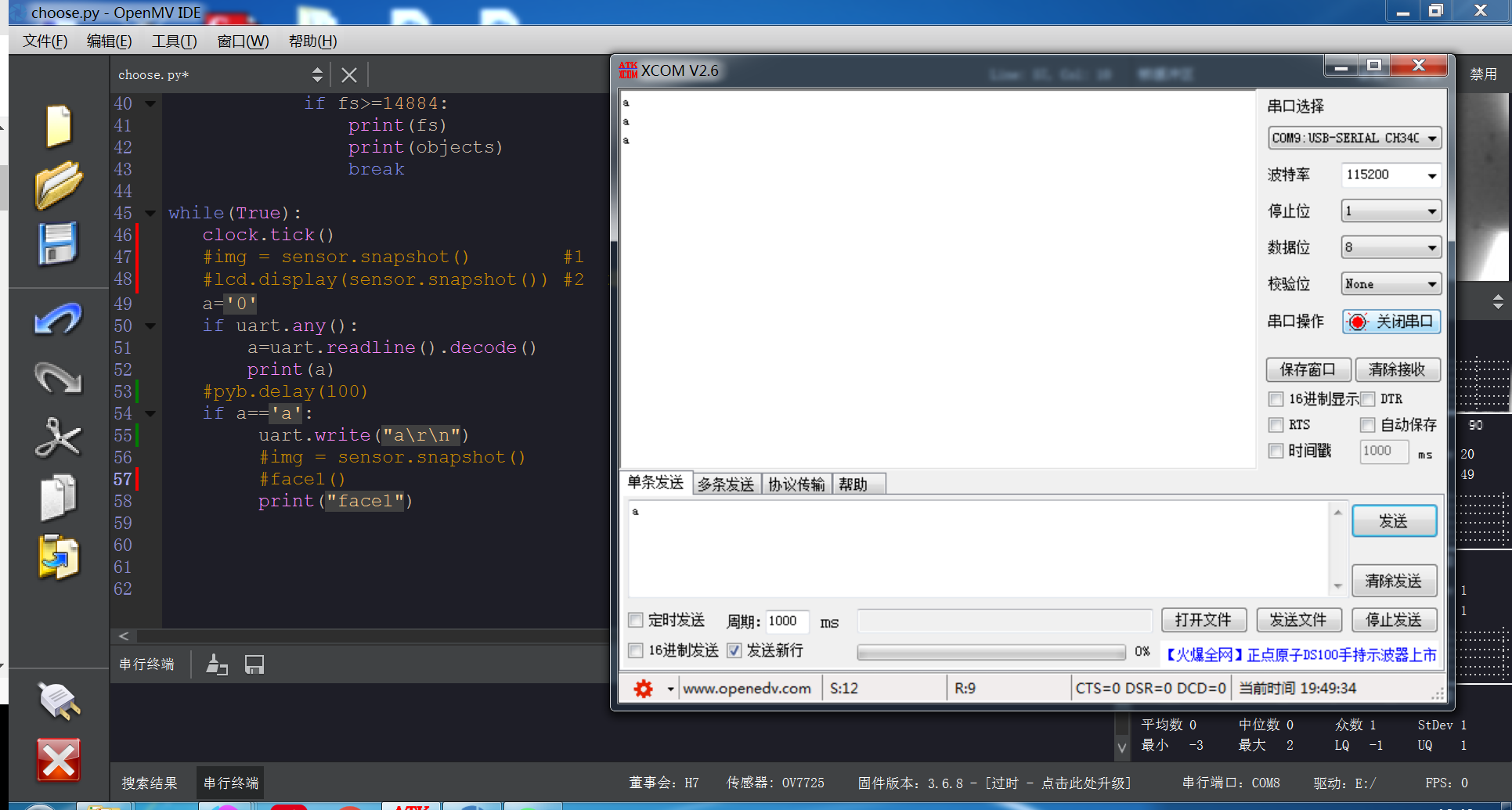
第二张是把拍照的函数注释掉,也无法接收
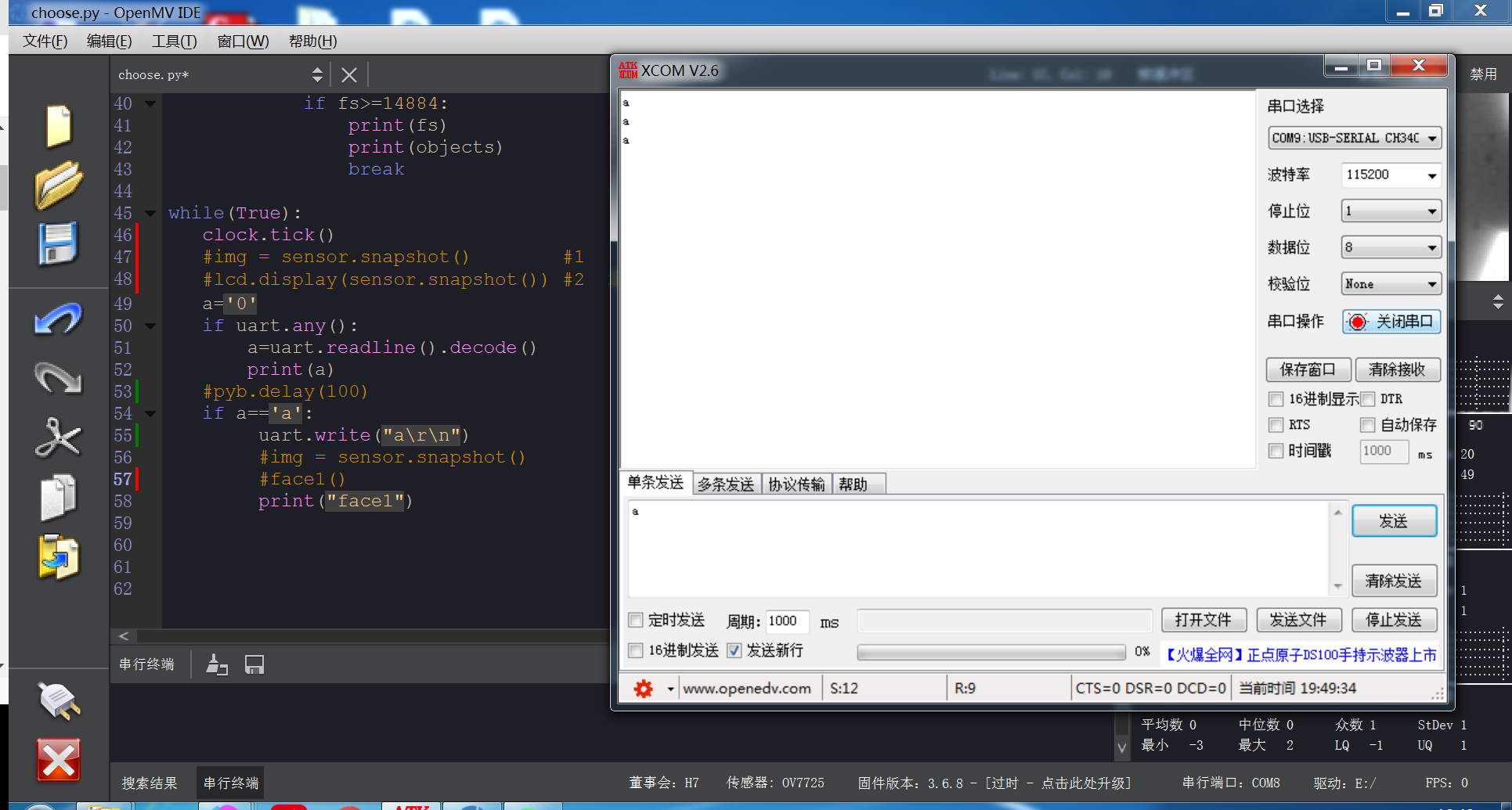
第三张是把拍照和lcd显示的两个函数全注释掉,才能正常接收数据
-
第一张和第二张图片OpenMV收到数据了。第三张图片OpenMV没有收到数据。
因为IDE的终端里没有打印数据。
-
@kidswong999 你可以截下图我看下嘛?
-
@kidswong999
 这是第一张,没接到数据
这是第一张,没接到数据
-
@kidswong999
 这是第二张,没接到数据
这是第二张,没接到数据
-
@kidswong999
 这是第三张,接收到数据
这是第三张,接收到数据
-
@kidswong999 三次截图的不同之处在于,我把代码中的两行代码注释与否,所以才会得出不同结果,我想问的是代码中标记的两行代码为什么会影响串口发送数据?因为我看不到库是怎么写的,只有使用方法,所以现在不知道是哪里冲突还是怎样
-
@kidswong999
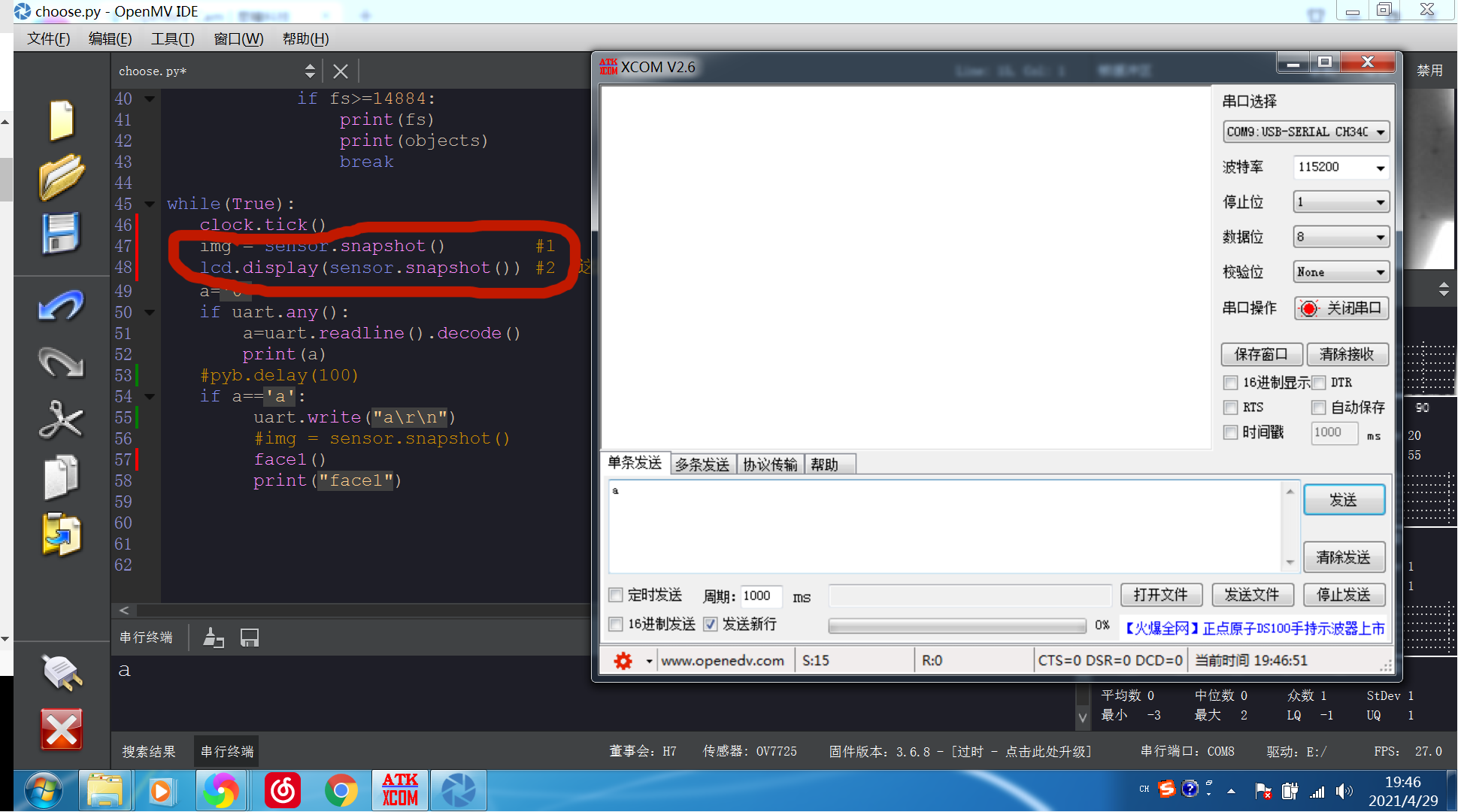 这两行,你可以把代码贴到IDE中去试一下,只要这两行不注释掉,就无法发送数据
这两行,你可以把代码贴到IDE中去试一下,只要这两行不注释掉,就无法发送数据
-
看上去是if a=='a'这里有问题。
你可以试试再加一句else。因为a有可以不是'a',
你的串口调试助手里的"发送新行",我不知道是加了'\r'还是'\n',还是'\r\n'。
假设是'\r\n'吧,那a有可能是'a\r\n'。还有一个是沾包的问题。
解决办法就是串口初始化里设置一下timeout。测试代码
import sensor, time, image, lcd, math,pyb from pyb import UART #RED_LED_PIN = 1 #BLUE_LED_PIN = 3 uart = UART(3, 115200) sensor.reset() sensor.set_contrast(3) sensor.set_gainceiling(16) sensor.set_framesize(sensor.HQVGA) # HQVGA最好,其次QVGA,QQVGA sensor.set_pixformat(sensor.GRAYSCALE) #注意人脸识别只能用灰度图哦 sensor.skip_frames(10) sensor.skip_frames(time = 5000) #等待5s face_cascade = image.HaarCascade("frontalface", stages=25) clock = time.clock() lcd.init() def face1(): uart.write("ok\r\n") print("ok") sensor.reset() sensor.set_contrast(3) sensor.set_gainceiling(16) sensor.set_framesize(sensor.HQVGA) # HQVGA最好,其次QVGA,QQVGA sensor.set_pixformat(sensor.GRAYSCALE) #注意人脸识别只能用灰度图哦 sensor.skip_frames(10) # Let new settings take affect. sensor.skip_frames(time = 5000) #等待5s while (True): img = sensor.snapshot() # 拍摄一张照片 lcd.display(sensor.snapshot()) objects = img.find_features(face_cascade, threshold=0.75, scale=1.35) #thresholds越大,匹配速度越快,错误率也会上升。scale可以缩放被匹配特征的大小。 for r in objects: img.draw_rectangle(r) #在找到的目标上画框,标记出来 if objects: for object in objects: fs=object[2]*object[3] if fs>=14884: print(fs) print(objects) break while(True): clock.tick() img = sensor.snapshot() #1 lcd.display(sensor.snapshot()) #2 这两行无论哪一行运行,串口都无法接收到数据 a='0' if uart.any(): a=uart.readline().decode() print(a) #pyb.delay(100) if a=='a': print('is a') uart.write("a\r\n") #img = sensor.snapshot() face1() print("face1") else: print('not a') print(a)解决代码:
import sensor, time, image, lcd, math,pyb from pyb import UART #RED_LED_PIN = 1 #BLUE_LED_PIN = 3 uart = UART(3, 115200, timeout=1000) sensor.reset() sensor.set_contrast(3) sensor.set_gainceiling(16) sensor.set_framesize(sensor.HQVGA) # HQVGA最好,其次QVGA,QQVGA sensor.set_pixformat(sensor.GRAYSCALE) #注意人脸识别只能用灰度图哦 sensor.skip_frames(10) sensor.skip_frames(time = 5000) #等待5s face_cascade = image.HaarCascade("frontalface", stages=25) clock = time.clock() lcd.init() def face1(): uart.write("ok\r\n") print("ok") sensor.reset() sensor.set_contrast(3) sensor.set_gainceiling(16) sensor.set_framesize(sensor.HQVGA) # HQVGA最好,其次QVGA,QQVGA sensor.set_pixformat(sensor.GRAYSCALE) #注意人脸识别只能用灰度图哦 sensor.skip_frames(10) # Let new settings take affect. sensor.skip_frames(time = 5000) #等待5s while (True): img = sensor.snapshot() # 拍摄一张照片 lcd.display(sensor.snapshot()) objects = img.find_features(face_cascade, threshold=0.75, scale=1.35) #thresholds越大,匹配速度越快,错误率也会上升。scale可以缩放被匹配特征的大小。 for r in objects: img.draw_rectangle(r) #在找到的目标上画框,标记出来 if objects: for object in objects: fs=object[2]*object[3] if fs>=14884: print(fs) print(objects) break while(True): clock.tick() img = sensor.snapshot() #1 lcd.display(sensor.snapshot()) #2 这两行无论哪一行运行,串口都无法接收到数据 a='0' if uart.any(): a=uart.readline().decode().strip() print(a) #pyb.delay(100) if a=='a': print('is a') uart.write("a\r\n") #img = sensor.snapshot() face1() print("face1") else: print('not a') print('a:',a)
-
@kidswong999 谢谢你,问题解决了