追小球的小车
-
教程里面不是有个追小球的小车这个历程吗?然后驱动电机那些我看得懂,然后那些算法我就看不懂,但我可以学下,但我好像没看到要追踪的小球,里面有出现小球吗?还是我忽略掉了?请教一下,谢谢
-
追小球的小车,一共有三个文件:
- car.py --电机控制模块,驱动电机,控制电机的运动。
- pid.py --pid算法控制模块
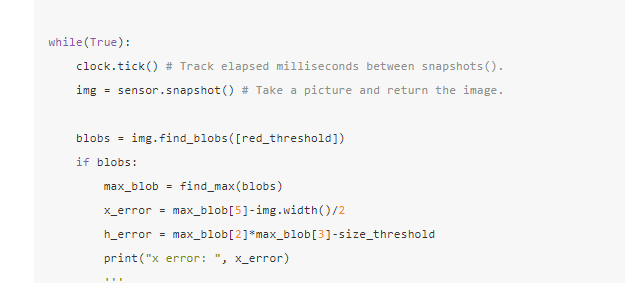
- main.py --就是我们的主程序,用来存放主要的识别代码。在追小球的小车中,主要存放的就是颜色识别的代码。这部分就是你要找的追踪小球的代码。
参考教程:
-
就是说其实追踪的还是颜色?
-
对的,默认main里面就是追踪颜色。当然,你可以自己修改成追踪形状或者其他特征,只要改一下函数就行了。
-
那改为形状会不会效果没那么好
-
你可以试一下。
区别主要在于,圆形识别运算量比较大,帧率会比颜色识别要慢一些,大概每秒10帧。
另外,圆形识别可能会有背景其他物体的干扰。
-
那颜色受到的干扰会大吗,如果有其他范围来有其他颜色存在
-
选好颜色阈值,控制好环境光,基本就可以了。当然,如果有相近的颜色,也会有干扰。
你最好实际测试一下。不试试又怎么看到效果呢…
-
有没有研究过是那种颜色受到的干扰会比较少的
-
@yuan 小车的驱动哪里我有点地方看不懂的
ef run(left_speed, right_speed):
if inverse_left==True:
left_speed=(-left_speed)
if inverse_right==True:
right_speed=(-right_speed)if left_speed < 0: ain1.low() ain2.high() else: ain1.high() ain2.low() ch1.pulse_width_percent(abs(left_speed)) if right_speed < 0: bin1.low() bin2.high() else: bin1.high() bin2.low() ch2.pulse_width_percent(abs(right_speed))这段代码,当中左轮速度跟右轮速度是要自己输入的吗?还有ain1.2,和bin1.2是电机的负极吗?
-
是通过ain12,和bin12来控制点击驱动,也就是TB6612芯片
-
@kidswong999 如果要改变历程里面跟踪的颜色,是不是就改这个就可以了
red_threshold = ( 55, 80, 20, 70, 0, 25)#这个是红色吧?
-
请先看看教程,有很详细的步骤
https://forum.singtown.com/topic/2/openmv的教程在哪里