U
uye4 发布的帖子
-
判断色块坐标是否在画面中心坐标一定范围内,报错?希望能看下我这逻辑代码是否可以?发布在 OpenMV Cam
# Blob Detection Example # # This example shows off how to use the find_blobs function to find color # blobs in the image. This example in particular looks for dark green objects. import sensor, image, time, pyb,mjpeg from pyb import UART,Pin,Timer import utime import json uart=pyb.UART(3,115200,timeout_char=1000) uart.init(115200, bits=8, parity=None, stop=1) p_out = Pin('P7',Pin.OUT_PP) p_out.low() # For color tracking to work really well you should ideally be in a very, very, # very, controlled enviroment where the lighting is constant... blue_threshold_01 = (0, 100, -16, 127, -128, -31) #设置蓝色的阈值,括号里面的数值分别是L A B 的最大值和最小值(minL, maxL, minA, # maxA, minB, maxB),LAB的值在图像左侧三个坐标图中选取。如果是灰度图,则只需 #设置(min, max)两个数字即可。 # You may need to tweak the above settings for tracking green things... # Select an area in the Framebuffer to copy the color settings. sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.RGB565) # use RGB565. sensor.set_framesize(sensor.QVGA) # use QVGA for quailtiy ,use QQVGA for speed. sensor.skip_frames(10) # Let new settings take affect. sensor.set_auto_whitebal(False) #关闭白平衡。白平衡是默认开启的,在颜色识别中,需要关闭白平衡。 clock = time.clock() # Tracks FPS. ''' 扩宽roi ''' def expand_roi(roi): # set for QQVGA 160*120 extra = 5 win_size = (160, 120) (x, y, width, height) = roi new_roi = [x-extra, y-extra, width+2*extra, height+2*extra] if new_roi[0] < 0: new_roi[0] = 0 if new_roi[1] < 0: new_roi[1] = 0 if new_roi[2] > win_size[0]: new_roi[2] = win_size[0] if new_roi[3] > win_size[1]: new_roi[3] = win_size[1] return tuple(new_roi) while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() # Take a picture and return the image. # pixels_threshold=100, area_threshold=100 blobs = img.find_blobs([blue_threshold_01], area_threshold=150) if blobs: #如果找到了目标颜色 # print(blobs) for blob in blobs: #迭代找到的目标颜色区域 is_circle = False max_circle = None max_radius = -1 new_roi = expand_roi(blob.rect()) for c in img.find_circles(threshold = 2000, x_margin = 20, y_margin = 20, r_margin = 10, roi=new_roi): is_circle = True # img.draw_circle(c.x(), c.y(), c.r(), color = (255, 255, 255)) if c.r() > max_radius: max_radius = c.r() max_circle = c if is_circle: # 如果有对应颜色的圆形 标记外框 # Draw a rect around the blob. img.draw_rectangle(new_roi) # rect img.draw_rectangle(blob.rect()) # rect #用矩形标记出目标颜色区域 img.draw_cross(blob[5], blob[6]) # cx, cy img.draw_circle(max_circle.x(), max_circle.y(), max_circle.r(), color = (0, 0, 255)) img.draw_circle(max_circle.x(), max_circle.y(), max_circle.r() + 1, color = (0, 0, 255)) print(blob[5], blob[6]) z=100 x_h=(blob[5]>>8)&0xff x_l=blob[5]&0xff y_h=(blob[6]>>8)&0xff y_l=blob[6]&0xff z_h=(z>>8)&0xff z_l=z&0xff data=bytearray([0x02,x_h,x_l,y_h,y_l,z_h,z_l,0x06,0x0D,0X0A]) print('you send:',data) uart.write(data) if (sensor.width/2 -10<=blob[5]<=sensor.width/2 +10) and (sensor.height/2 -10<=blob[6]<=sensor.height/2 +10): z=50 x_h=(blob[5]>>8)&0xff x_l=blob[5]&0xff y_h=(blob[6]>>8)&0xff y_l=blob[6]&0xff z_h=(z>>8)&0xff z_l=z&0xff data1=bytearray([0x02,x_h,x_l,y_h,y_l,z_h,z_l,0x06,0x0D,0X0A]) print('you send:',data1) uart.write(data1) timesleep(1000) timesleep(1000) timesleep(1000) z=0 x_h=(blob[5]>>8)&0xff x_l=blob[5]&0xff y_h=(blob[6]>>8)&0xff y_l=blob[6]&0xff z_h=(z>>8)&0xff z_l=z&0xff data2=bytearray([0x02,x_h,x_l,y_h,y_l,z_h,z_l,0x06,0x0D,0X0A]) print('you send:',data2) uart.write(data2) #p_out.high() print(clock.fps()) # Note: Your OpenMV Cam runs about half as fast while # connected to your computer. The FPS should increase once disconnected.!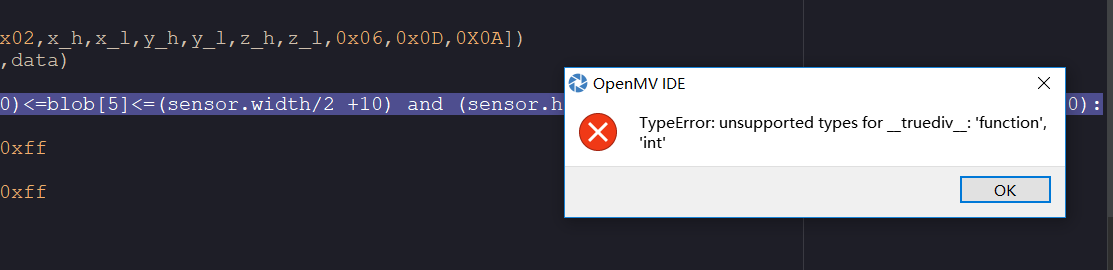
-
运行测试的例程,openmv重新上电后,sd卡里的视频0字节大小,打不开?发布在 OpenMV Cam
import sensor, image, time, mjpeg, pyb
RED_LED_PIN = 1
BLUE_LED_PIN = 3
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # or sensor.GRAYSCALE
sensor.set_framesize(sensor.QVGA) # or sensor.QQVGA (or others)
sensor.skip_frames(10) # Let new settings take affect.
clock = time.clock() # Tracks FPS.
pyb.LED(RED_LED_PIN).on()
sensor.skip_frames(30) # Give the user time to get ready.
pyb.LED(RED_LED_PIN).off()
pyb.LED(BLUE_LED_PIN).on()
m = mjpeg.Mjpeg("test1.mjpeg")
#mjpeg.Mjpeg(filename, width=Auto, height=Auto)创建一个mjpeg对象,
#filename为保存mjpeg动图的文件路径
print("You're on camera!")
for i in range(200):
clock.tick()m.add_frame(sensor.snapshot())
#mjpeg.add_frame(image, quality=50)
#quality为视频压缩质量。
print(clock.fps())
m.close(clock.fps())
pyb.LED(BLUE_LED_PIN).off()
print("Done! Reset the camera to see the saved recording.")
测试的例程,重新上电还是一样0字节 -
RE: 用保存视频的例程,在sd卡里的视频怎么是0字节大小?发布在 OpenMV Cam
@kidswong999 import sensor, image, time, mjpeg, pyb
RED_LED_PIN = 1
BLUE_LED_PIN = 3
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # or sensor.GRAYSCALE
sensor.set_framesize(sensor.QVGA) # or sensor.QQVGA (or others)
sensor.skip_frames(10) # Let new settings take affect.
clock = time.clock() # Tracks FPS.
pyb.LED(RED_LED_PIN).on()
sensor.skip_frames(30) # Give the user time to get ready.
pyb.LED(RED_LED_PIN).off()
pyb.LED(BLUE_LED_PIN).on()
m = mjpeg.Mjpeg("test1.mjpeg")
#mjpeg.Mjpeg(filename, width=Auto, height=Auto)创建一个mjpeg对象,
#filename为保存mjpeg动图的文件路径
print("You're on camera!")
for i in range(200):
clock.tick() m.add_frame(sensor.snapshot()) #mjpeg.add_frame(image, quality=50) #quality为视频压缩质量。 print(clock.fps())m.close(clock.fps())
pyb.LED(BLUE_LED_PIN).off()
print("Done! Reset the camera to see the saved recording.")
测试的例程,重新上电还是一样0字节 -
RE: 数据类型转化迟迟不行?发布在 OpenMV Cam
import sensor, image, time, pyb, math from pyb import UART,Pin,Timer import utime import json uart=pyb.UART(3,115200,timeout_char=1000) threshold_index = 0 # 0 for red, 1 for green, 2 for blue # Color Tracking Thresholds (L Min, L Max, A Min, A Max, B Min, B Max) # The below thresholds track in general red/green/blue things. You may wish to tune them... thresholds = [(30, 100, 15, 127, 15, 127), # generic_red_thresholds (30, 100, -64, -8, -32, 32), # generic_green_thresholds (0, 100, -16, 127, -128, -31)] # generic_blue_thresholds #-------------------摄像头初始化----------------------------- sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking clock = time.clock() #start = pyb.millis() # get value of millisecond counter 获取毫秒计数器的值 verify_code=b'\xFF\x00\xAA\xEA\xFF' # Only blobs that with more pixels than "pixel_threshold" and more area than "area_threshold" are # returned by "find_blobs" below. Change "pixels_threshold" and "area_threshold" if you change the # camera resolution. "merge=True" merges all overlapping blobs in the image. def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3]>max_size: max_blob=blob max_size=blob[2]*blob[3] return max_blob #if(blob[5]==sensor.width/2) and (blob[6]==sensor.height/2): while(True): clock.tick() img = sensor.snapshot().lens_corr(strength = 1.8, zoom = 1.0)#摄像头畸变矫正 blobs = img.find_blobs([thresholds[2]]) #print(img.width()/2,img.height()/2) if blobs: max_blob=find_max(blobs) #img.draw_rectangle(max_blob.rect()) img.draw_cross(max_blob.cx(),max_blob.cy()) print("you're on camera!") #sensor.snapshot().save("LHP.jpg") #x="[%u]"%(max_blob.cx()) #y="[%u]"%(max_blob.cy()) x=hex(max_blob.cx()) y=hex(max_blob.cy()) print(x,y) x_h=(x>>8)&0xff #x_l=hex(x&0xff) #y_h=((y>>8)&0x0ff) #y_l=(y&0xff) #rc=x_h+x_l+y_h+y_l #data=bytearray([0x02,x_h,x_l,y_h,y_l,0x00,rc]) #print('you send:',data)报错就和上面一样,我就想把坐标数据拆成十六进制的打包发送
-
RE: 形状检测和颜色检测,颜色能识别蓝色圆,形状却圈住红色的圆发布在 OpenMV Cam
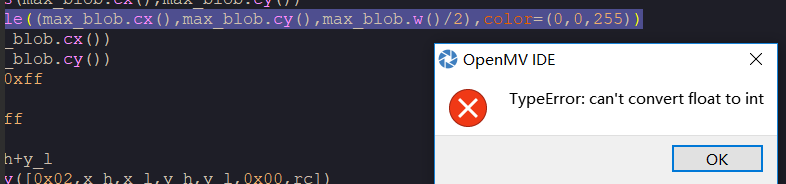 报错了,我想先颜色检测后再霍夫圆,不知道怎么解决你说的for c in img.find_circles的问题
报错了,我想先颜色检测后再霍夫圆,不知道怎么解决你说的for c in img.find_circles的问题 -
形状检测和颜色检测,颜色能识别蓝色圆,形状却圈住红色的圆发布在 OpenMV Cam
# Single Color RGB565 Blob Tracking Example # # This example shows off single color RGB565 tracking using the OpenMV Cam. import sensor, image, time,pyb,math from pyb import UART,Pin,Timer import json uart=pyb.UART(3,115200,timeout_char=1000) threshold_index = 0 # 0 for red, 1 for green, 2 for blue # Color Tracking Thresholds (L Min, L Max, A Min, A Max, B Min, B Max) # The below thresholds track in general red/green/blue things. You may wish to tune them... thresholds = [(30, 100, 15, 127, 15, 127), # generic_red_thresholds (30, 100, -64, -8, -32, 32), # generic_green_thresholds (0, 100, -16, 127, -128, -31)] # generic_blue_thresholds #-------------------摄像头初始化----------------------------- sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking clock = time.clock() #start = pyb.millis() # get value of millisecond counter 获取毫秒计数器的值 # Only blobs that with more pixels than "pixel_threshold" and more area than "area_threshold" are # returned by "find_blobs" below. Change "pixels_threshold" and "area_threshold" if you change the # camera resolution. "merge=True" merges all overlapping blobs in the image. def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3]>max_size: max_blob=blob max_size=blob[2]*blob[3] return max_blob #if(blob[5]==sensor.width/2) and (blob[6]==sensor.height/2): while(True): clock.tick() img = sensor.snapshot().lens_corr(strength = 1.8, zoom = 1.0)#摄像头畸变矫正 for c in img.find_circles(threshold=3500,x_margin=20,y_margin=20, r_margin=20,r_min=2,r_max=100,r_step=2): area=(c.x()-c.r(),c.y()-c.r(),2*c.r(),2*c.r()) statistics=img.get_statistics(roi=area) #print(statistics) blobs = img.find_blobs([thresholds[2]]) #print(img.width()/2,img.height()/2) if blobs: img.draw_circle((c.x(),c.y(),c.r()),color=(0,0,255)) max_blob=find_max(blobs) #img.draw_rectangle(max_blob.rect()) img.draw_cross(max_blob.cx(),max_blob.cy()) output_str="[%d,%d]"%(max_blob.cx(),max_blob.cy()) print('you send:',output_str) uart.write( output_str+'\r\n') else: #img.draw_rectangle(area,color=(255,0,0)) print('not found!')![0_1555560618830_~GZ)[78~P(OU]CK68_RV4(N.png](https://fcdn.singtown.com/3af92be1-22c3-4058-a8ad-c0867817dddf.png)