咱摄像头串口可以输出高低电平作为其他单片机的信号输入吗?求大佬发个参考代码
T
t3p5 发布的帖子
-
寻迹时如何使用舵机控向,代码应该怎么写?发布在 OpenMV Cam
请教一下,
 做循迹小车的时候如果用舵机控制方向(其他的和官方例程一样),而不是两个轮子的转速差,那么舵机旋转角度控制的代码应该怎么写哇⊙∀⊙!
做循迹小车的时候如果用舵机控制方向(其他的和官方例程一样),而不是两个轮子的转速差,那么舵机旋转角度控制的代码应该怎么写哇⊙∀⊙! -
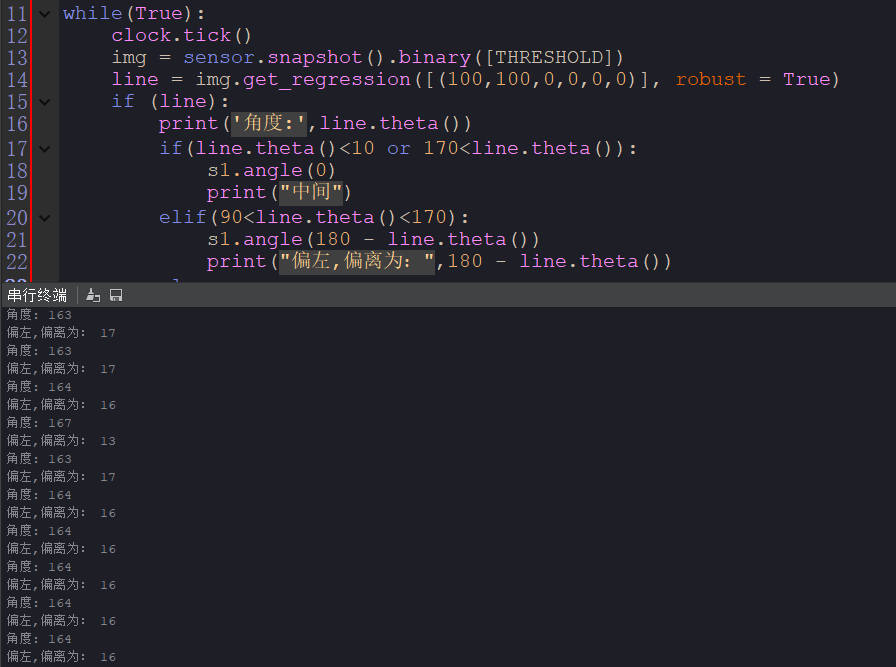
大佬们帮忙康康我的这个,感觉逻辑上行得通,就是舵机没办法正常转(转的幅度不大,而且感觉并不是和检测到的偏离很一致)发布在 OpenMV Cam
THRESHOLD = (0, 30, -10, 10, -20, 10) import sensor, image, time from pyb import Servo import car s1 = Servo(1) # servo on position 1 (P7) sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQQVGA) sensor.skip_frames(time = 2000) clock = time.clock() while(True): clock.tick() img = sensor.snapshot().binary([THRESHOLD]) line = img.get_regression([(100,100,0,0,0,0)], robust = True) if (line): print('角度:',line.theta()) if(line.theta()<10 or 170<line.theta()): s1.angle(0) print("中间") elif(90<line.theta()<170): s1.angle(180 - line.theta()) print("偏左") else : s1.angle(line.theta()) print("偏右") else: car.run(50,-50) pass