墨星STM32有很多rx与tx的口,怎么配置他们才能进行通信,比如在openmv中,p0与p1的引脚通信配置的时候为uart = UART(1, 115200),p4与p5的引脚通信配置的时候为uart = UART(3, 115200)。对应的 墨星STM32该怎么配置呢
G
gaoxianshneg 发布的帖子
-
墨星STM32上手教程-micropython发布在 OpenMV Cam
-
RE: 用openmv发送十六进制数据发布在 OpenMV Cam
TTL转RS485模块是半双工的,但是会自动切换流向。
我的代码是不是向编码器发送了 3E 00 00 10 0C ,openmv会不会多发了什么东西?比如b或者\r\n?
我的接收会不会是16进制?如果是的话,openmv的接收函数要不要变?或者接收程序里的某些代码要变? -
用openmv发送十六进制数据发布在 OpenMV Cam
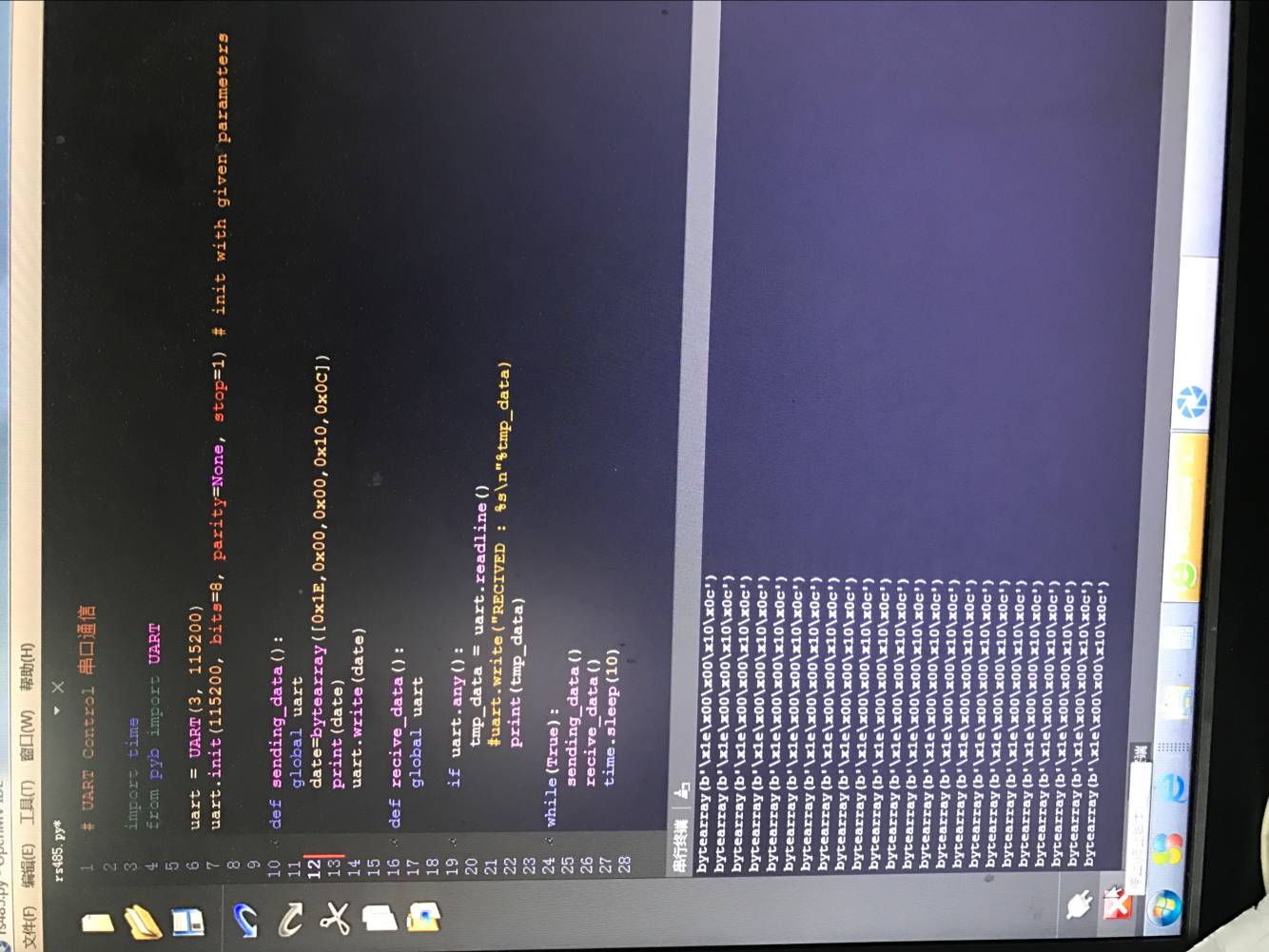
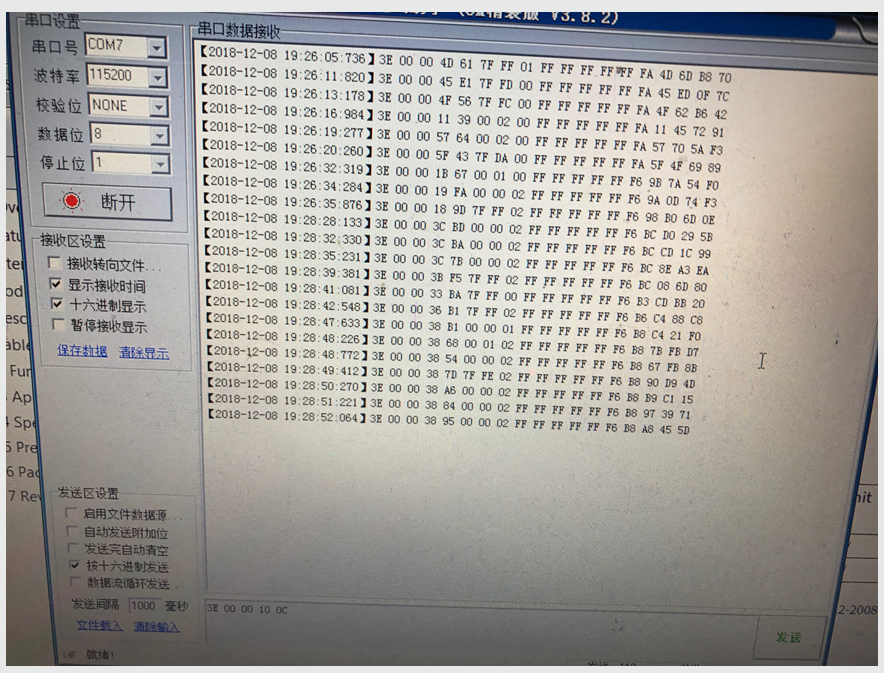 我的编码器是rs485通信的,而且是应答式的,必须发送16进制数据3E 00 00 10 0C编码器才能回传数据,我就加了个485转ttl模块,下面是我写的代码,不知道哪里出错了,在openmv上显示不成功?但是在电脑串口助手上成功了。帮我一下,谢谢你了!
我的编码器是rs485通信的,而且是应答式的,必须发送16进制数据3E 00 00 10 0C编码器才能回传数据,我就加了个485转ttl模块,下面是我写的代码,不知道哪里出错了,在openmv上显示不成功?但是在电脑串口助手上成功了。帮我一下,谢谢你了!# UART Control 串口通信 import time from pyb import UART uart = UART(3, 115200) uart.init(115200, bits=8, parity=None, stop=1) # init with given parameters def sending_data(): global uart date=bytearray([0x3E,0x00,0x00,0x10,0x0C]) #print(date) uart.write(date) def recive_data(): global uart if uart.any(): tmp_data = uart.readline() #uart.write("RECIVED : %s\n"%tmp_data) print(tmp_data) while(True): sending_data() recive_data() time.sleep(10)  -
line.rho()返回霍夫变换的p值发布在 OpenMV Cam
line.rho()返回霍夫变换后的直线p值。我看到在小车巡线上用到了这个值,用来判断返回直线(中线)的偏离中央的程度。但是这个值得具体物理意义是什么?能不能画图解释一下?
-
RE: get_regression函数中的roi的书写发布在 OpenMV Cam
你好,get_regression是上面的格式,image.get_regression(thresholds[, invert=False[, roi[, x_stride=2[, y_stride=1[, area_threshold=10[, pixels_threshold=10[, robust=False]]]]]]])
thresholds 必须是元组列表。 [(lo, hi), (lo, hi), ..., (lo, hi)] 定义你想追踪的颜色范围。也就是上图中的【(100,100,0,0,0,0)】也就是黑色部分。现在我想在这个基础上加入roi 是感兴趣区域,如上图的roi=(0,0,160,20)。也就是说既要感兴趣的颜色,又要感兴趣的区域。
get_regression的格式我没看懂,你给的答案是只有感兴趣的区域。
希望你的回复既有感兴趣的颜色,又有感兴趣的区域。 -
get_regression函数中的roi的书写发布在 OpenMV Cam
THRESHOLD = (15, 48, -42, 33, -48, 71)# Grayscale threshold for dark things... import sensor, image, time #引入感知、视觉、时间模块 import pyb #引入pyb模块 from pyb import Servo #引入舵机模块 k=0.1 #角度的调整系数,是调快还是调慢 s1 = Servo(1) # P7 s2 = Servo(2) # P8 n=40 sensor.reset() sensor.set_vflip(True) sensor.set_hmirror(True) sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) # 80x60 (4,800 pixels) - O(N^2) max = 2,3040,000. #sensor.set_windowing([0,20,80,40]) sensor.skip_frames(time = 2000) # WARNING: If you use QQVGA it may take seconds clock = time.clock() # 引入时钟对象 roi=(0,0,160,20) while(True): clock.tick() img = sensor.snapshot().binary([THRESHOLD]) line = img.get_regression([(100,100,0,0,0,0)],roi, robust = True) if (line): line_theta=line.theta() print("%f" % line_theta) img.draw_line(line.line(), color = 127) ![0_1538657260206_2TUD16@LYTK3%P_)]9T_IJV.png](https://fcdn.singtown.com/2e196a2e-85f3-46ec-850d-b5287876fc49.png)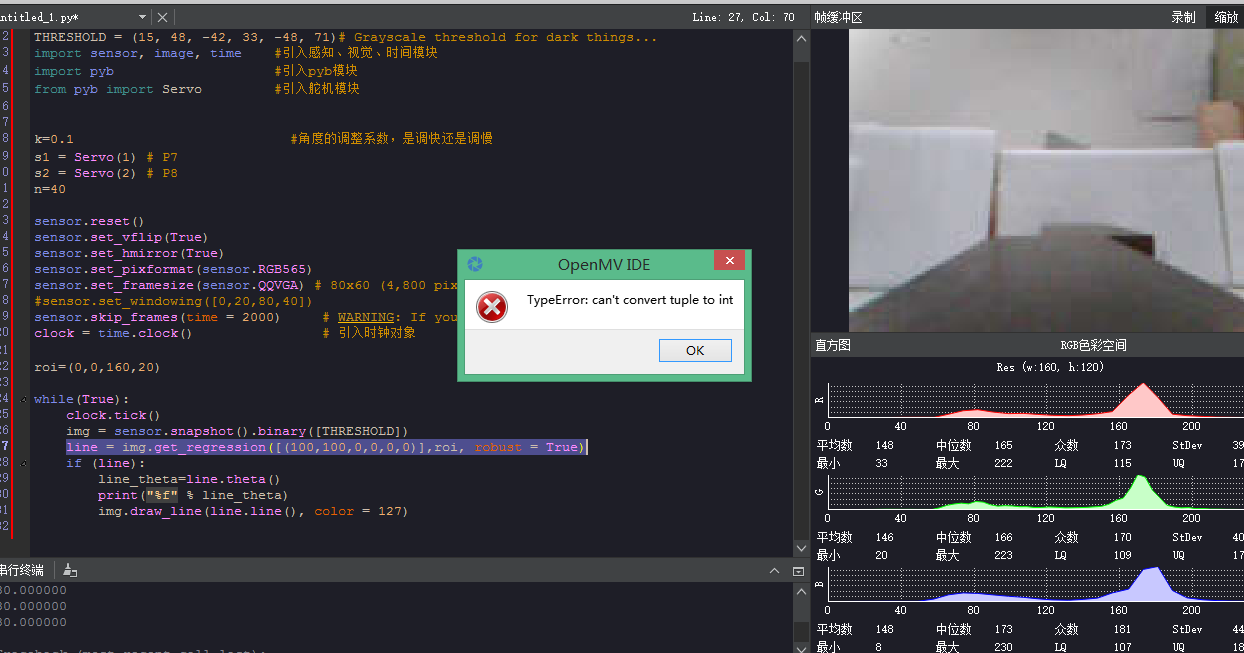

![0_1544358998035_RZ8{KE`SPT@B80S~_T[7K]H.png](https://fcdn.singtown.com/c5dadc98-05ca-45b9-99da-886625b91de8.png)
