Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you may not be able to execute some actions.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
回复: 怎样知道openmv串口发送的数据(没有扩展板的情况)
那USB接口怎么和openmv连接呢?
那又是怎么测出Apriltag的旋转角度的呢?
利用openmv怎么识别出Apriltag的大小?
为什么我使用不同大小的Apriltag都能测出距离呢?其中的原理是什么?
具体是哪一个一篇文章呢?
用openmv测Apriltag的位姿时,为什么使用不同大小的Apriltag, IDE都能检测出相对位姿呢?
openmv是怎么识别出Apriltag的四个角点,并建立坐标的?
那请问,三个坐标轴的旋转顺序是什么样的才得到的这三个值?
那这个Rx是三个欧拉角其中的一个么?
函数库中给出的解释是:返回以弧度计的AprilTag在X平面上的旋度。 但是能用更浅显的表达方式么?
想让两个舵机分别先处于零位,再分别转动30度,怎么实现?
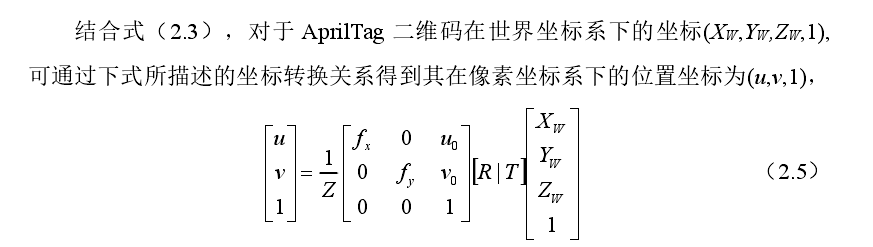
就是求出相机相对于Apriltag的位姿。
利用openmv自带的示例——find_apriltags_3d_pose,已经测出了x、y、z、rx、ry、rz,求Apriltag相对于相机的旋转矩阵?