识别黑色的阈值问题
-
识别黑色,设置阈值,是使用black_threshold =(100,59,33,-100,-128,30),还是GRAYSCALE_THRESHOLD = [(0, 64)],如果用灰度图的话,就红色也会当成黑色识别,这个问题怎么解决。同时,如何在不同颜色的干扰下识别指定宽度的黑色直线,如0.5cm的黑色直线
-
既然你用灰度图有问题,那就用彩色的呗。。。
直线你可以试试 http://book.openmv.cc/example/09-Feature-Detection/find-lines.html
-
您说的这个,我试过,不管用。只要是直线都识别,也是灰度图,分不出哪条是自己需要的,达不到效果。
彩色图又会特别乱,无法圈出正确的黑色区域
-
你需要具体说一下你要做什么,最好上张图。
-
我需要做的就是让openmv识别一条宽为0.5cm的黑线,然后上传数据```
请在这里粘贴代码
import sensor, image, time, pyb
from pyb import UART
import json
import mathblack_threshold =(100,59,33,-100,-128,30)
#black_threshold =(100,50,97,-126,-128,93)
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # use RGB565.
sensor.set_framesize(sensor.QVGA) # use QQVGA for speed.
sensor.skip_frames(10) # Let new settings take affect.
sensor.set_auto_whitebal(False) # turn this off.
clock = time.clock() # Tracks FPS.uart = UART(3, 9600)
uart.init(9600, bits=8, parity=None, stop=1)
while(True):
clock.tick()
img = sensor.snapshot()
img.draw_cross(160,120)blobs = img.find_blobs([black_threshold]) if blobs: print('sum : %d'% len(blobs)) out_str = '[' for b in blobs: img.draw_rectangle(b[0:4]) # rect img.draw_cross(b[5], b[6]) # cx, cy x = b[5] y = b[6] img.get_pixel(x,y) out_str += '(%d,%d)' % (x,y) out_str += ']' print(out_str) if x<160: text = "right\n" elif x>160: text = "left\n" else: text = "stop\n" for b in blobs: img.draw_rectangle(b[0:4]) # rect img.draw_cross(b[5], b[6]) # cx, cy x = b[5] y = b[6] p1=Point(b[5],b[6]) p2=Point(160,120) l=Getlen(p1,p2) #获取两点之间直线的长度 print(l.getlen()) img.get_pixel(x,y) out_str += '(%d,%d)' % (x,y) out_str += ']' print(out_str) uart.write(out_str+'\r\n') uart = UART(3, 9600) for i in (0,360): if x<160: uart.write(string1+'\r\n') elif x>160: uart.write(string2+'\r\n') else: uart.write(string5+'\r\n') for j in (0,240): if x<120: uart.write(string3+'\r\n') elif x>120: uart.write(string4+'\r\n') else: uart.write(string5+'\r\n') while(True): clock.tick() img = sensor.snapshot() img.draw_cross(160,120) blobs = img.find_blobs([black_threshold]) if blobs: print('sum : %d'% len(blobs)) out_str = '[' for b in blobs: img.draw_rectangle(b[0:4]) # rect img.draw_cross(b[5], b[6]) # cx, cy x = b[5] y = b[6] a=b[0]+b[1] c=b[1]+b[3] out_str += '(%d,%d)' % (x,y) out_str += ']' print(out_str) if b[2]>b[3]: if 160<a: uart.write(string1+'\r\n') elif 160>a: uart.write(string2+'\r\n') else: uart.write(string5+'\r\n') else: if 120<c: uart.write(string4+'\r\n') elif 120>c: uart.write(string3+'\r\n') else: uart.write(string5+'\r\n')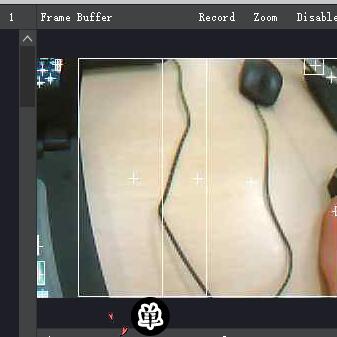 这个图片是彩色图的黑线识别,但是识别不了
这个图片是彩色图的黑线识别,但是识别不了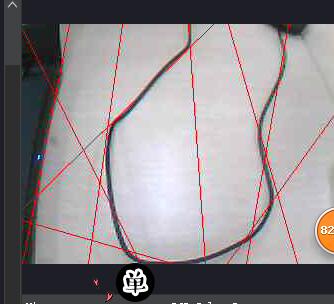
这个图片是您说的那个直线识别的程序跑出来的,openmv图像上标出的直线是乱的
-
@18892337362 图片没有上传成功
-
@yuan 没有收到您发过来的,图片上传不成功