系统迁移中,暂时无法访问,所有数据会迁移到新的网站。
OpenMV VSCode 扩展发布了,在插件市场直接搜索OpenMV就可以安装
如果有产品硬件故障问题,比如无法开机,论坛很难解决。可以直接找售后维修。
发帖子之前,请确认看过所有的视频教程,https://singtown.com/learn/ 和所有的上手教程http://book.openmv.cc/
每一个新的提问,单独发一个新帖子
帖子需要目的,你要做什么?
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
必看:玩转星瞳论坛了解一下图片上传,代码格式等问题。
"return" outside function,求解
-
import sensor, image, time from pid import PID from pyb import Servo pan_servo=Servo(1) tilt_servo=Servo(2) pan_servo.calibration(500,2500,500) tilt_servo.calibration(500,2500,500) red_threshold = (13, 49, 18, 61, 6, 47) pan_pid = PID(p=0.07, i=0, imax=90) #脱机运行或者禁用图像传输,使用这个PID tilt_pid = PID(p=0.05, i=0, imax=90) #脱机运行或者禁用图像传输,使用这个PID #pan_pid = PID(p=0.1, i=0, imax=90)#在线调试使用这个PID #tilt_pid = PID(p=0.1, i=0, imax=90)#在线调试使用这个PID sensor.reset() # Initialize the camera sensor. sensor.set_auto_gain(False) sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.RGB565 sensor.set_framesize(sensor. QVGA) # or sensor.QVGA (or others) sensor.skip_frames(time=900) # Let new settings take affect. sensor.set_auto_exposure(False, 1000)#在这里调节曝光度,调节完可以比较清晰地看清激光点 sensor.set_auto_whitebal(False) # turn this off. sensor.set_auto_gain(False) # 关闭增益(色块识别时必须要关) def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob=blob max_size = blob[2]*blob[3] return max_blob while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() # Take a picture and return the image. blobs = img.find_blobs(threshold,x_stride=1, y_stride=1, area_threshold=0, pixels_threshold=0,merge=False,margin=1) if len(blobs)>=1 :#有色块 # Draw a rect around the blob. b = blobs[0] #img.draw_rectangle(b[0:4]) # rect cx = b[5] cy = b[6] for i in range(len(blobs)-1): #img.draw_rectangle(b[0:4]) # rect cx = blobs[i][5]+cx cy = blobs[i][6]+cy cx=int(cx/len(blobs)) cy=int(cy/len(blobs)) #img.draw_cross(cx, cy) # cx, cy print(cx,cy) return int(cx), int(cy) return -1, -1 #表示没有找到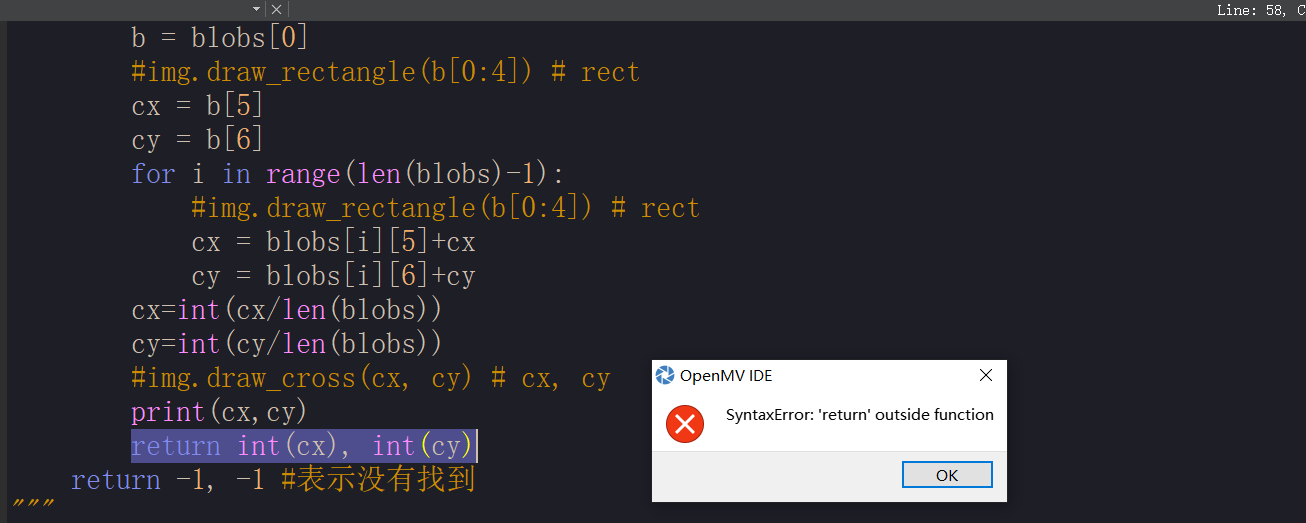
-
while True不是函数,是主循环,不能返回