追小球的小车的速度
-
追小球的小车历程里面,他的速度是全速的吗?还是会通过PID里面的算法和捕抓的面积来自动调节PWM的?因为的把他放在地上跑的时候,他一直就都是全速的,我就想让他在近距离的时候把速度降下来。
-
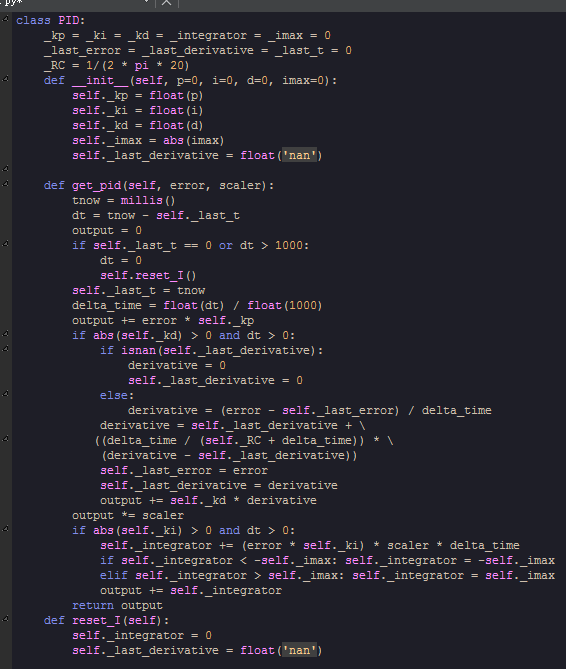
通过PID调节两个轮子的速度才能实现追踪的。
追踪的效果就是,离目标越近,速度越慢。所以你的需求PID本来就是实现的。
-
但我发现不了他能够实现距离越近,速度就越慢这个功能,或许是不明显?
-
你是在用追踪目标?请把代码发送一下,以及实际的效果发个gif什么的。
-
我追踪的就是红色的一个小球,程序也是完全复制粘贴历程的。
-
@kidswong999 !
 效果也是速度变化不明显。
效果也是速度变化不明显。
-
你的小车 调好了吗?
-
@18792669459 就是没有
-
@1111111111 你的小车 左转右转时候速度差别大不大?
-
@18792669459 什么左转右转?我就感觉不到我的小车是能够跟着小球转弯的。
-
@1111111111 那你的目标是实现什么效果呢?做什么小车、
-
@18792669459 我就是完全用的历程里面的程序,就追一个红色的小球,然而我发现速度太快,距离近的时候不能减速,不能跟着转弯
-
@kidswong999 我怎么发GIF那些给你啊
-
我想问一下,你调节颜色的阈值了吗?
-
@kidswong999 调了 红色我选的黄色
-
最后结果怎么样?请问调好了吗?