@fimw 同问,楼主解决了吗?
zgir 发布的帖子
-
RE: RGB565识别色块,帧率过低怎么办发布在 OpenMV Cam
@lk3r 你可以给一下逻辑,当主控板给OpenMV发送某个数据即OpenMV接收到主控板发送的某个数据时,才发送数据给主控板
-
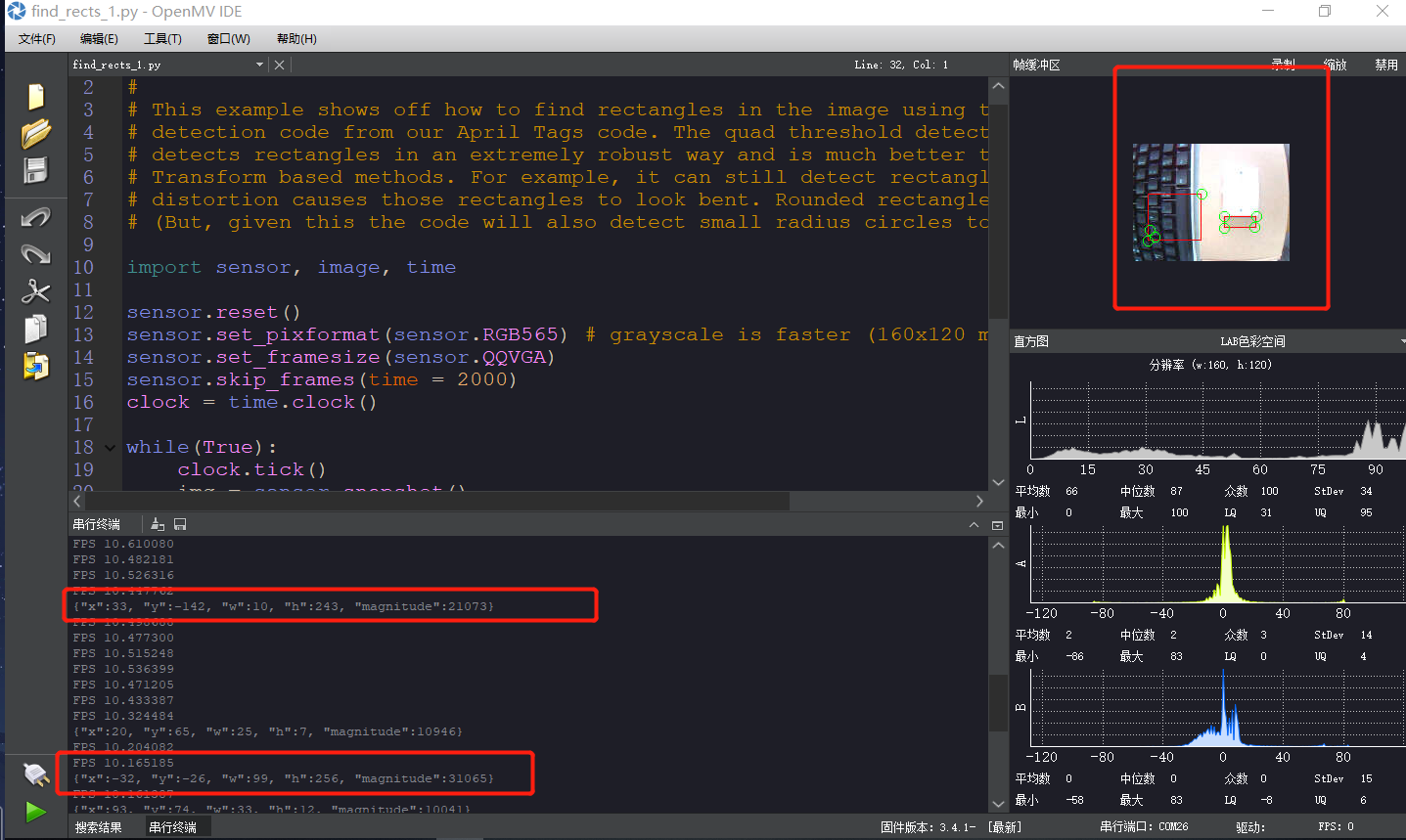
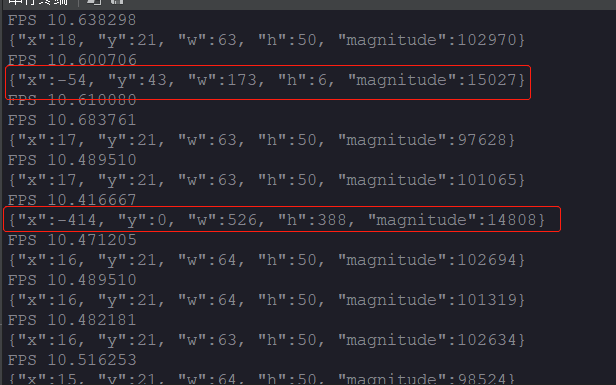
我在运行识别矩形的例程时,发现rect.x()为负值,这是为什么?发布在 OpenMV Cam
我在运行识别矩形的例程时,发现rect.x(),rect.y()为负值,这是为什么?
代码:# Find Rects Example # # This example shows off how to find rectangles in the image using the quad threshold # detection code from our April Tags code. The quad threshold detection algorithm # detects rectangles in an extremely robust way and is much better than Hough # Transform based methods. For example, it can still detect rectangles even when lens # distortion causes those rectangles to look bent. Rounded rectangles are no problem! # (But, given this the code will also detect small radius circles too)... import sensor, image, time sensor.reset() sensor.set_pixformat(sensor.RGB565) # grayscale is faster (160x120 max on OpenMV-M7) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) clock = time.clock() while(True): clock.tick() img = sensor.snapshot() # `threshold` below should be set to a high enough value to filter out noise # rectangles detected in the image which have low edge magnitudes. Rectangles # have larger edge magnitudes the larger and more contrasty they are... for r in img.find_rects(threshold = 10000): img.draw_rectangle(r.rect(), color = (255, 0, 0)) for p in r.corners(): img.draw_circle(p[0], p[1], 5, color = (0, 255, 0)) print(r) print("FPS %f" % clock.fps())运行结果:
-
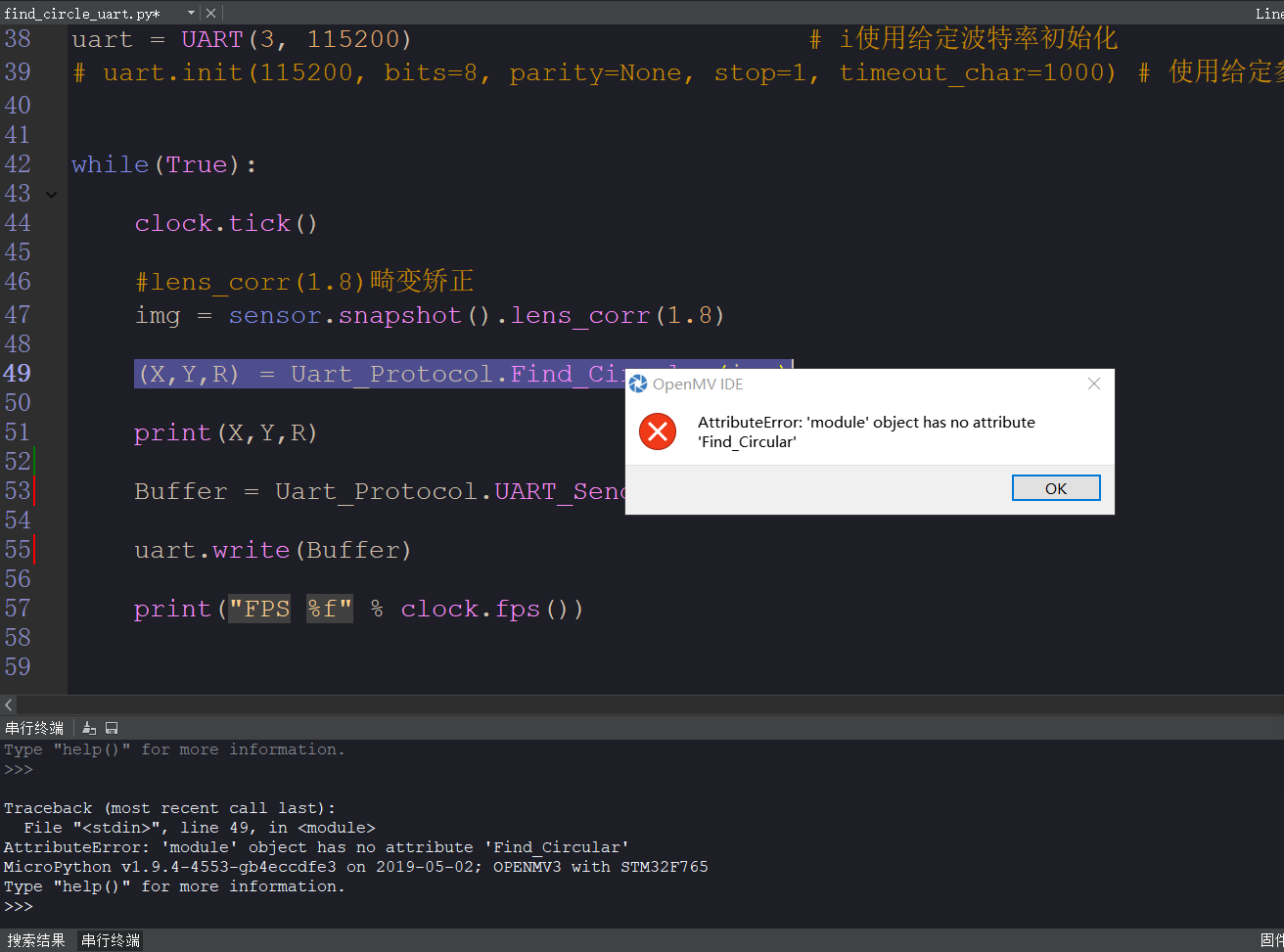
我在多文件编程时遇到了问题,求解答发布在 OpenMV Cam
我在多文件编程时,想在find_circle_uart.py中调用Uart_Protocol.py时,遇到问题AttributeError:' module' object has no attribute ' Find Circular',应该怎么解决?
问题截图:
代码如下:
Uart_Protocol.py:import sensor, image, time def ExceptionVar(var): data = [] data.append(0) data.append(0) if var == -1: data[0] = 0 data[1] = 0 else: data[0] = var & 0xFF data[1] = var >> 8 return data Frame_Cnt = 0 fCnt_tmp = [0,0] # FormType : 所识别的形状 Ps: 0: Cricle -> 圆心坐标 -> 半径 # 1: Rectangle -> 中心坐标 -> # 2: Lines -> 端点坐标(靠近(0,0)) -> 角度 # 3: LineSegment -> 端点坐标 -> 角度angle # FormType_X,FormType_Y : 坐标 # FormType_Other : 其他 def UART_Send(FormType, FormType_X, FormType_Y, FormType_Other): global Frame_Cnt global fCnt_tmp Frame_Head = [170,170] Frame_End = [85,85] fFormType_tmp = [FormType] Frame_Cnt += 1 if Frame_Cnt > 65534 : FrameCnt = 0 fHead = bytes(Frame_Head) fCnt_tmp[0] = Frame_Cnt & 0xFF fCnt_tmp[1] = Frame_Cnt >> 8 fCnt = bytes(fCnt_tmp) fFormType = bytes(fFormType_tmp) fFormType_X = bytes(ExceptionVar(FormType_X)) fFormType_Y = bytes(ExceptionVar(FormType_Y)) fFormType_Other = bytes(ExceptionVar(FormType_Other)) fEnd = bytes(Frame_End) FrameBuffe = fHead + fCnt + fFormType + fFormType_X + fFormType_Y + fFormType_Other + fEnd return FrameBuffefind_circle_uart.py:
# 识别圆形 # OpenMV识别图像中的圆形,并将圆形的坐标,半径通过串口 # 发送给MSP432. # 串口发送的数据结构参考中科浩电的巡线例程 import sensor, image, time, pyb import math import Uart_Protocol from pyb import UART from pyb import LED Led1 = pyb.LED(3) # 蓝灯 # Ps:pyb.LED(1):Red; pyb.LED(1):Green; pyb.LED(4):IR # 指示灯 def LED_flicker(): Led1.on() time.sleep(150) Led1.off() time.sleep(150) sensor.reset() sensor.set_pixformat(sensor.RGB565) # grayscale is faster sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) clock = time.clock() uart = UART(3, 115200) # i使用给定波特率初始化 # uart.init(115200, bits=8, parity=None, stop=1, timeout_char=1000) # 使用给定参数初始化 while(True): clock.tick() #lens_corr(1.8)畸变矫正 img = sensor.snapshot().lens_corr(1.8) (X,Y,R) = Uart_Protocol.Find_Circular(img) print(X,Y,R) uart.write(Uart_Protocol.UART_Send_Circular(X,Y,R)) print("FPS %f" % clock.fps()) -
问题:TypeError:unsupported types for _and_:"float,int'该怎么解决?发布在 OpenMV Cam
我在写程序时遇到问题TypeError:unsupported types for and:"float,int'该怎么解决?
问题截图:
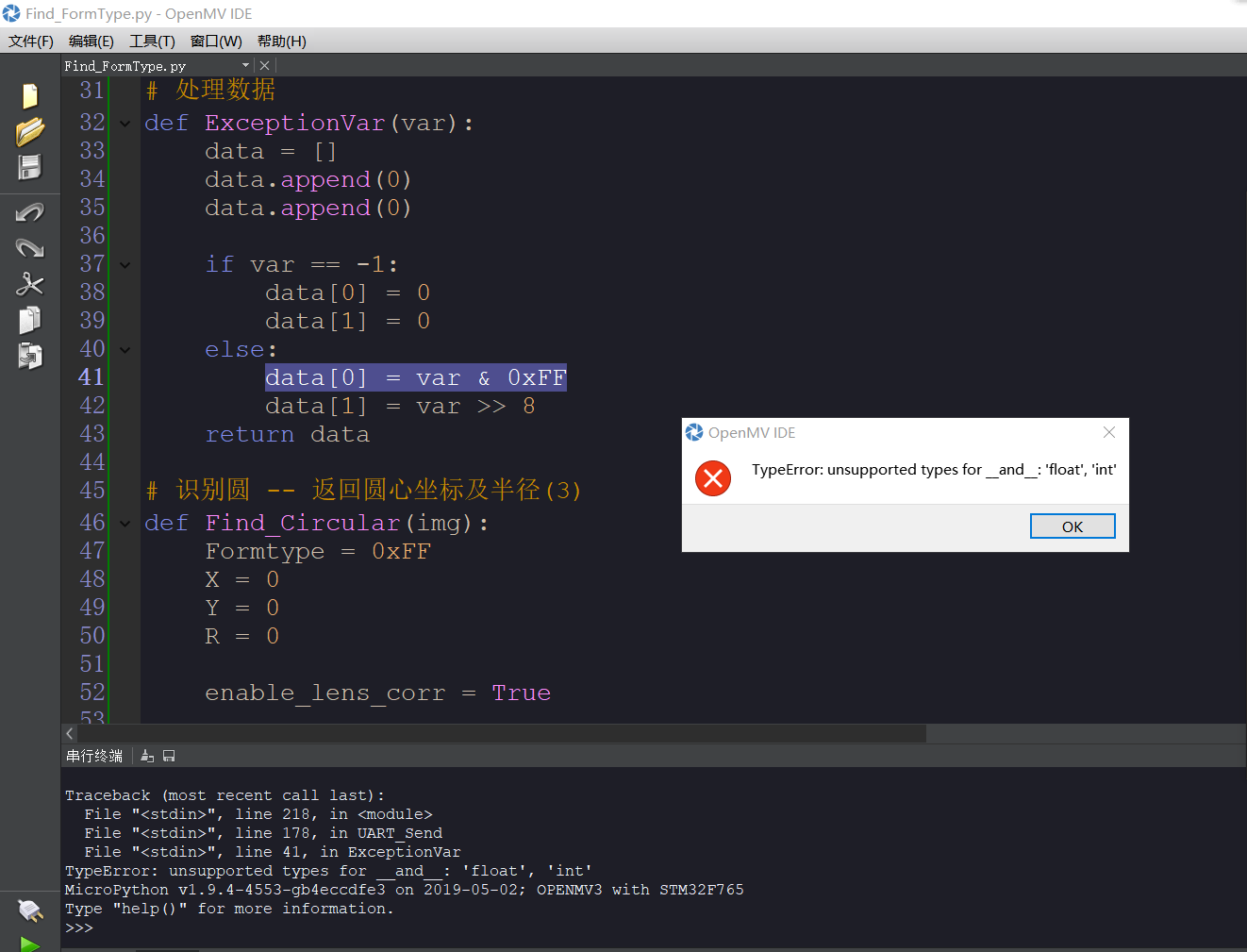
程序如下:
import sensor, image, time, pyb import math from pyb import UART from pyb import LED Led1 = pyb.LED(3) # 蓝灯 # Ps:pyb.LED(1):Red; pyb.LED(1):Green; pyb.LED(4):IR enable_lens_corr = False # 使能畸变校正标志 # True: 允许畸变校正; False: 禁止畸变校正 # 指示灯 def LED_flicker(): Led1.on() time.sleep(150) Led1.off() time.sleep(150) # 处理数据 def ExceptionVar(var): data = [] data.append(0) data.append(0) if var == -1: data[0] = 0 data[1] = 0 else: data[0] = var & 0xFF data[1] = var >> 8 return data # 识别圆 -- 返回圆心坐标及半径(3) def Find_Circular(img): Formtype = 0xFF X = 0 Y = 0 R = 0 enable_lens_corr = True if enable_lens_corr: img.lens_corr(1.8) # 适用于2.8mm镜头... for c in img.find_circles(threshold = 4000, x_margin = 10, y_margin = 10, r_margin = 10,r_min = 2, r_max = 100, r_step = 2): img.draw_circle(c.x(), c.y(), c.r(), color = (255, 0, 0)) # print(c.x()) Circle_buffer = "[%d,%d,%d]"%(c.x(), c.y(), c.r()) print(Circle_buffer) LED_flicker() X = c.x() Y = c.y() R = c.r() Formtype = 0 return Formtype,X,Y,R # 识别矩形 -- 返回矩形中心点坐标(2) def Find_Rectangle(img): Formtype = 0xFF X = 0 Y = 0 W = 0 H = 0 for rects in img.find_rects():#roi=(0,0,80,120),threshold = 10000 img.draw_rectangle(rects.rect(), color = (255, 0, 0)) for p in rects.corners(): img.draw_circle(p[0], p[1], 5, color = (0, 255, 0)) print(rects) Formtype = 1 X = rects.x() + rects.w()/2 Y = rects.y() + rects.h()/2 # W = rects.w() H = rects.h() rectBuffer = "[%d,%d]"%(X,Y) print(rectBuffer) return Formtype,X,Y,W # 识别直线 -- 返回端点坐标及角度angle(3) def Find_Lines(img): Formtype = 0xFF X = 0 Y = 0 Angle = 0 min_degree = 0 max_degree = 179 if enable_lens_corr: img.lens_corr(1.8) # 适用于2.8mm镜头... for lines in img.find_lines(threshold = 1000, theta_margin = 25, rho_margin = 25): if (min_degree <= lines.theta()) and (lines.theta() <= max_degree): img.draw_line(lines.line(), color = (255, 0, 0)) Formtype = 2 X = lines.x1() Y = lines.y1() Angle = lines.theta() return Formtype,X,Y,Angle # 识别线段 -- 返回端点坐标及角度angle(3) def Find_LineSegment(img): Formtype = 0xFF X = 0 Y = 0 Angle = 0 if enable_lens_corr: img.lens_corr(1.8) # for 2.8mm lens... for linesegment in img.find_line_segments(merge_distance = 0, max_theta_diff = 5): img.draw_line(linesegment.line(), color = (255, 0, 0)) print(linesegment) Formtype = 3 X = linesegment.x1() Y = linesegment.y1() Angle = linesegment.theta() return Formtype,X,Y,Angle # 识别三角形 def Find_Triangle(img): pass # 识别形状(圆,矩形,直线,线段,三角形(线段角度)) def Find_Formtype(img): pass Frame_Cnt = 0 fCnt_tmp = [0,0] # FormType : 所识别的形状 Ps: 0: Cricle -> 圆心坐标 -> 半径 # 1: Rectangle -> 中心坐标 -> # 2: Lines -> 端点坐标(靠近(0,0)) -> 角度 # 3: LineSegment -> 端点坐标 -> 角度angle # FormType_X,FormType_Y : 坐标 # FormType_Other : 其他 def UART_Send(FormType, FormType_X, FormType_Y, FormType_Other): global Frame_Cnt global fCnt_tmp Frame_Head = [170,170] Frame_End = [85,85] fFormType_tmp = [FormType] Frame_Cnt += 1 if Frame_Cnt > 65534 : FrameCnt = 0 fHead = bytes(Frame_Head) fCnt_tmp[0] = Frame_Cnt & 0xFF fCnt_tmp[1] = Frame_Cnt >> 8 fCnt = bytes(fCnt_tmp) fFormType = bytes(fFormType_tmp) fFormType_X = bytes(ExceptionVar(FormType_X)) fFormType_Y = bytes(ExceptionVar(FormType_Y)) fFormType_Other = bytes(ExceptionVar(FormType_Other)) fEnd = bytes(Frame_End) FrameBuffe = fHead + fCnt + fFormType + fFormType_X + fFormType_Y + fFormType_Other + fEnd return FrameBuffe sensor.reset() sensor.set_pixformat(sensor.RGB565) # grayscale is faster sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) clock = time.clock() uart = UART(3, 115200) # i使用给定波特率初始化 # uart.init(115200, bits=8, parity=None, stop=1, timeout_char=1000) # 使用给定参数初始化 while(True): clock.tick() #lens_corr(1.8)畸变矫正 img = sensor.snapshot() # (FormType,X,Y,R) = Find_Circular(img) (FormType,X,Y,W) = Find_Rectangle(img) # (FormType,X,Y,Angle) = Find_Lines(img) # (FormType,X,Y,Angle) = Find_LineSegment(img) if(FormType == 0): print(FormType,X,Y,R) uart.write(UART_Send(FormType,X,Y,R)) elif(FormType == 1): print(FormType,X,Y,W) uart.write(UART_Send(FormType,X,Y,W)) elif(FormType == 2): print(FormType,X,Y,Angle) uart.write(UART_Send(FormType,X,Y,Angle)) elif(FormType == 3): print(FormType,X,Y,Angle) uart.write(UART_Send(FormType,X,Y,Angle)) print("FPS %f" % clock.fps()) -
OpenMv串口发送的数据是什么类型的?MSP432该怎么解析OpenMV发送的数据发布在 OpenMV Cam
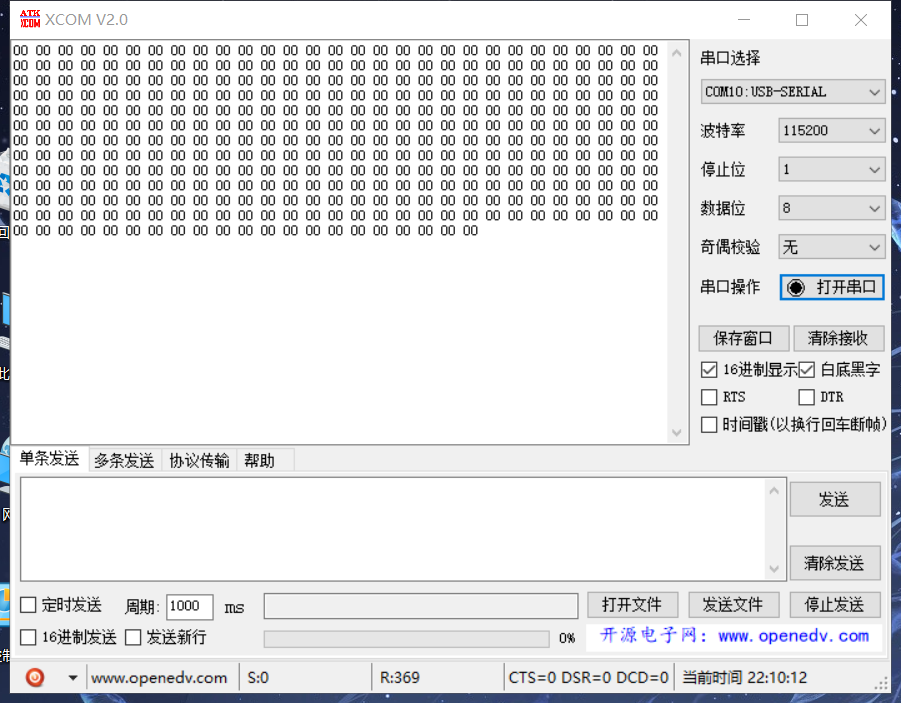
这是我写的openmv识别圆的程序,我想把识别到的圆的circle.x(),circle.y()通过串口发送给MSP432,我这个串口发送的是什么类型的数据?我用串口助手查看OpenMV发送的数据,发现全都是0,这是为什么呢?
以下是我写的OpenMV代码:
# 圆形检测例程 # # 这个例子展示了如何用Hough变换在图像中找到圆。 # https://en.wikipedia.org/wiki/Circle_Hough_Transform # # 请注意,find_circles()方法将只能找到完全在图像内部的圆。圈子之外的 # 图像/ roi被忽略... import sensor, image, time, pyb from pyb import UART LED1 = pyb.LED(3) sensor.reset() sensor.set_pixformat(sensor.RGB565) # grayscale is faster sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) clock = time.clock() uart = UART(3, 9600, timeout_char=1000) # i使用给定波特率初始化 uart.init(9600, bits=8, parity=None, stop=1, timeout_char=1000) # 使用给定参数初始化 while(True): clock.tick() #lens_corr(1.8)畸变矫正 img = sensor.snapshot().lens_corr(1.8) # Circle对象有四个值: x, y, r (半径), 和 magnitude。 # magnitude是检测圆的强度。越高越好 # roi 是一个用以复制的矩形的感兴趣区域(x, y, w, h)。如果未指定, # ROI 即图像矩形。操作范围仅限于roi区域内的像素。 # (以左上角为原点) # x_stride 是霍夫变换时需要跳过的x像素的数量。若已知圆较大,可增加 # x_stride 。(检测识别x方向大于x_stride个像素点的圆) # y_stride 是霍夫变换时需要跳过的y像素的数量。若已知直线较大,可增加 # y_stride 。 # threshold 控制从霍夫变换中监测到的圆。只返回大于或等于阈值的圆。 # 应用程序的阈值正确值取决于图像。注意:一条圆的大小是组成圆所有 # 索贝尔滤波像素大小的总和。 # (如果检测到的圆多余实际,则调大阈值threshold;反之,调小阈值threshold) # x_margin 控制所检测的圆的合并。 圆像素为 x_margin 、 y_margin 和 # r_margin的部分合并。 #(若检测到的两个圆x方向间距小于x_margin个像素点则被合并) # y_margin 控制所检测的圆的合并。 圆像素为 x_margin 、 y_margin 和 # r_margin 的部分合并。 # r_margin 控制所检测的圆的合并。 圆像素为 x_margin 、 y_margin 和 # r_margin 的部分合并。 # r_min,r_max和r_step控制测试圆的半径。 # 缩小测试圆半径的数量可以大大提升性能。 # threshold = 3500比较合适。如果视野中检测到的圆过多,请增大阈值; # 相反,如果视野中检测到的圆过少,请减少阈值。 for c in img.find_circles(threshold = 4000, x_margin = 10, y_margin = 10, r_margin = 10,r_min = 2, r_max = 100, r_step = 2): img.draw_circle(c.x(), c.y(), c.r(), color = (255, 0, 0)) print(c.x()) Circle_buffer = "[%d,%d,%d]"%(c.x(), c.y(), c.r()) uart.write(Circle_buffer) uart.write("\r\n") LED1.on() time.sleep(150) LED1.off() time.sleep(100) print("FPS %f" % clock.fps())这是串口助手接收到的数据:
-
如何将OpenMV的数据存储到SD卡中?发布在 OpenMV Cam
我将OpenMV与MSP432连接,OpenMV给MSP432传输数据,我想将OpenMV的数据保存到OpenMV的SD卡中,以方便我在系统运行结束后查看OpenMv的数据
-
OpenMV中以下方法返回的参数单位是什么?发布在 OpenMV Cam

circle.x()
返回圆的x位置。
circle.y)
返回圆的y位置。
circle.r()
返回圆的半径。这里的圆的x,y位置和圆的半径的单位是什么?
是多少个像素点?还是cm?