该怎么控制它转动的角度呢?怎么让它随停呢?
Q
qdok
@qdok
0
声望
21
楼层
937
资料浏览
1
粉丝
0
关注
qdok 发布的帖子
-
RE: 180度的舵机,可以直接给它转180度的指令吗?如果可以,我给了它这个指令为什么它只转了90度?发布在 OpenMV Cam
@kidswong999 如果要自己写一个舵机控制函数的话,要怎么写啊?
-
如何让这个程序能:有垃圾放入才开始识别,而不是插电之后就开始识别摄像头照到的一切东西?发布在 OpenMV Cam
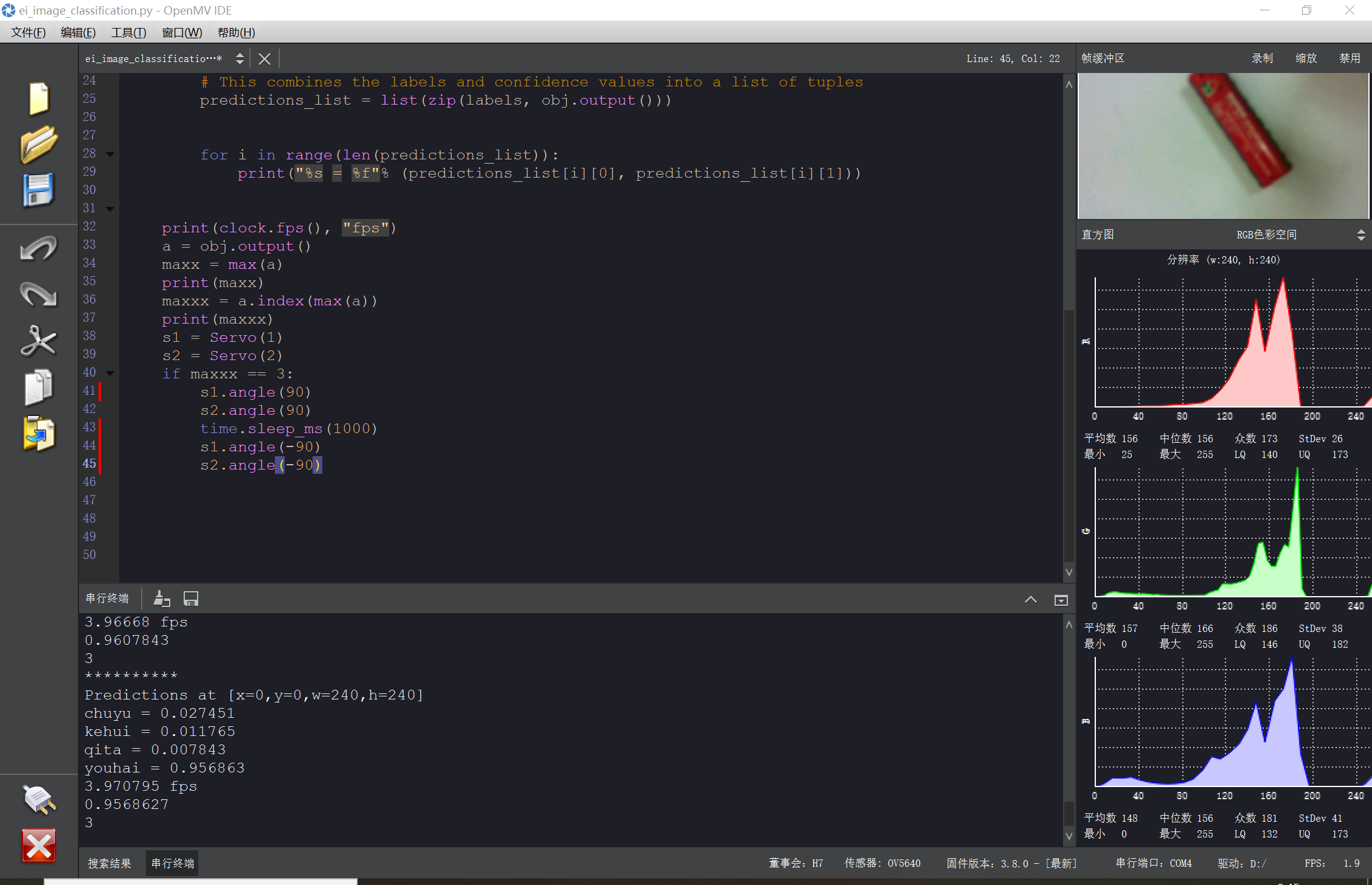
# main.py -- put your code here! import pyb, time from pyb import Servo import sensor, image, time, os, tf led = pyb.LED(3) usb = pyb.USB_VCP() # while (usb.isconnected()==False): led.on() # time.sleep(150) # led.off() # time.sleep(100) # led.on() # time.sleep(150) # led.off() # time.sleep(600) # Edge Impulse - OpenMV Image Classification Example sensor.reset() # Reset and initialize the sensor. sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE) sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240) sensor.set_windowing((240, 240)) # Set 240x240 window. sensor.skip_frames(time=2000) # Let the camera adjust. net = "trained.tflite" labels = [line.rstrip('\n') for line in open("labels.txt")] clock = time.clock() while(True): clock.tick() img = sensor.snapshot() # default settings just do one detection... change them to search the image... for obj in tf.classify(net, img, min_scale=1.0, scale_mul=0.8, x_overlap=0.5, y_overlap=0.5): print("**********\nPredictions at [x=%d,y=%d,w=%d,h=%d]" % obj.rect()) img.draw_rectangle(obj.rect()) # This combines the labels and confidence values into a list of tuples predictions_list = list(zip(labels, obj.output())) for i in range(len(predictions_list)): print("%s = %f"% (predictions_list[i][0], predictions_list[i][1])) print(clock.fps(), "fps") a = obj.output() maxx = max(a) print(maxx) maxxx = a.index(max(a)) print(maxxx) s1 = Servo(1) s2 = Servo(2) if maxxx == 3: s1.angle(90) time.sleep_ms(1000) s1.angle(0) time.sleep_ms(1000) s2.angle(90) time.sleep_ms(1000) s2.angle(0) time.sleep_ms(3000) s1.angle(180) time.sleep_ms(1000) s1.angle(0) -
RE: 180度的舵机,可以直接给它转180度的指令吗?如果可以,我给了它这个指令为什么它只转了90度?发布在 OpenMV Cam
@kidswong999 不行,运行你这个也只能是舵机转90度之后再回到0度。
-
180度的舵机,可以直接给它转180度的指令吗?如果可以,我给了它这个指令为什么它只转了90度?发布在 OpenMV Cam
from pyb import Servo import time s1 = Servo(1) s2 = Servo(2) s1.angle(180) time.sleep_ms(1000) -
为什么运行这个程序第一次能让舵机转,之后再运行就不转了?发布在 OpenMV Cam
import pyb s1 = pyb.Servo(1) # create a servo object on position P7 #在P7引脚创建servo对象 s1.angle(45) # move servo 1 to 45 degrees #将servo1移动到45度