# f_x是相机的x焦距。它应该等于以mm为单位的镜头焦距除以x传感器尺寸(以mm为单位)乘以图像中的像素数。
# 以下数值适用于配备2.8毫米镜头的OV7725相机。
# f_y是相机的y焦距。它应该等于以mm为单位的镜头焦距除以y传感器尺寸(以mm为单位)乘以图像中的像素数。
# 以下数值适用于配备2.8毫米镜头的OV7725相机。
# c_x是以像素为单位的图像x中心位置
# c_x是以像素为单位的图像x中心位置
f_x = (2.8 / 3.984) * 160 # find_apriltags 如果没有设置,则默认为这个
f_y = (2.8 / 2.952) * 120 # find_apriltags 如果没有设置,则默认为这个
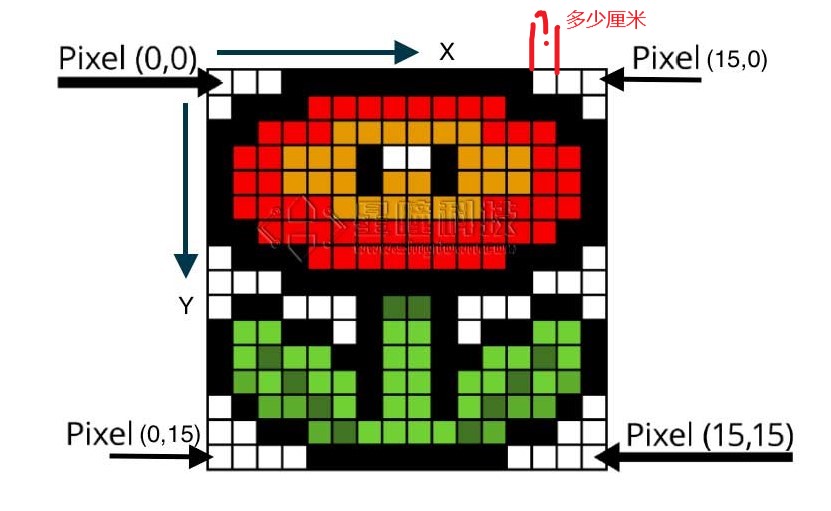
c_x = 160 * 0.5 # find_apriltags 如果没有设置,则默认为这个 (the image.w * 0.5)
c_y = 120 * 0.5 # find_apriltags 如果没有设置,则默认为这个 (the image.h * 0.5)
A
a6dz 发布的帖子
-
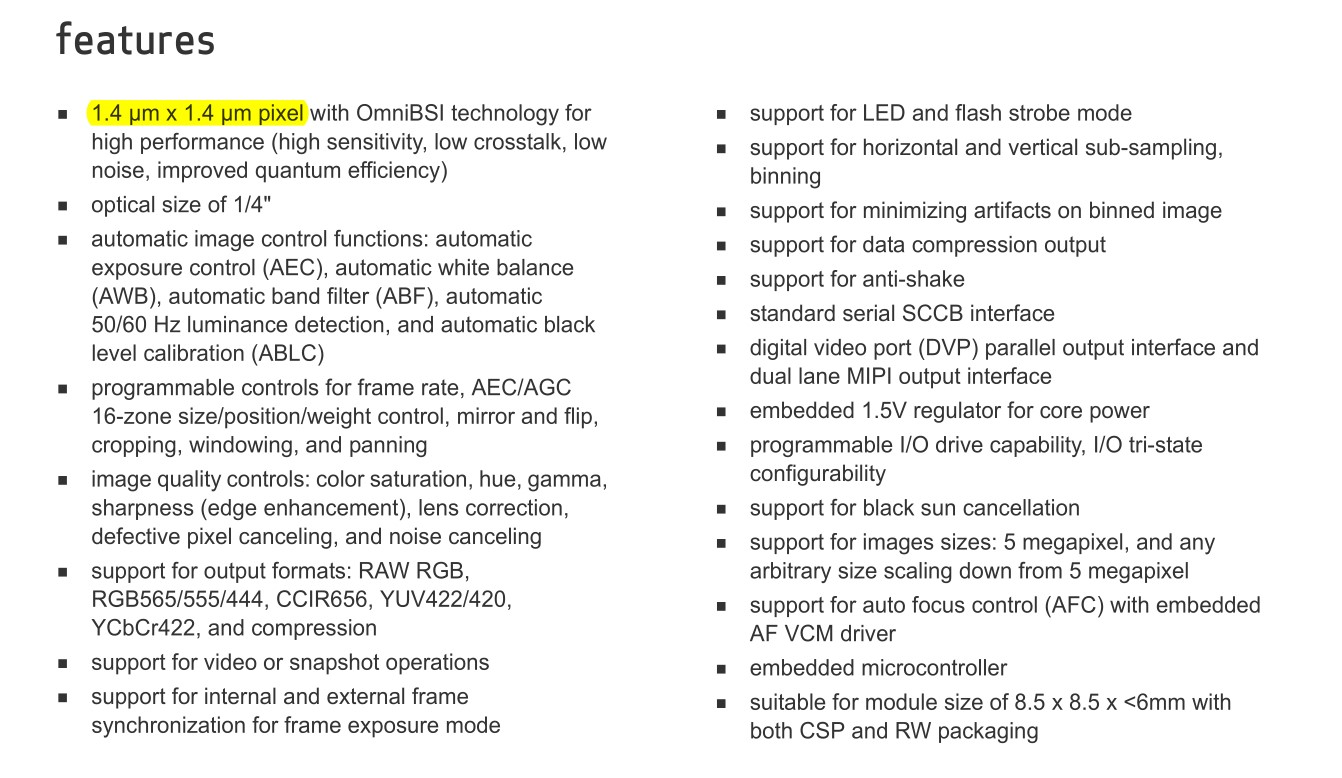
OV7725相机的传感器尺寸为3.984 X 2.952mm,那使用OV5640时应该改为多少?发布在 OpenMV Cam
-
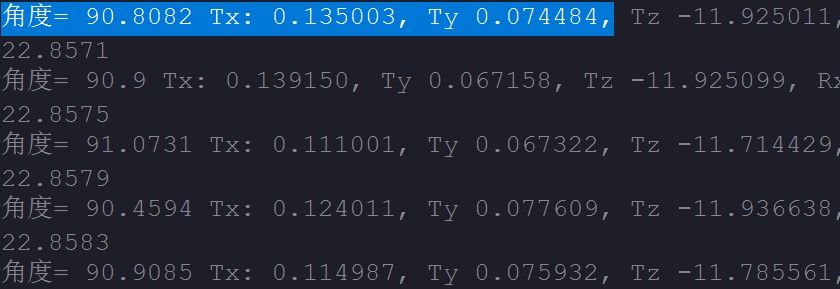
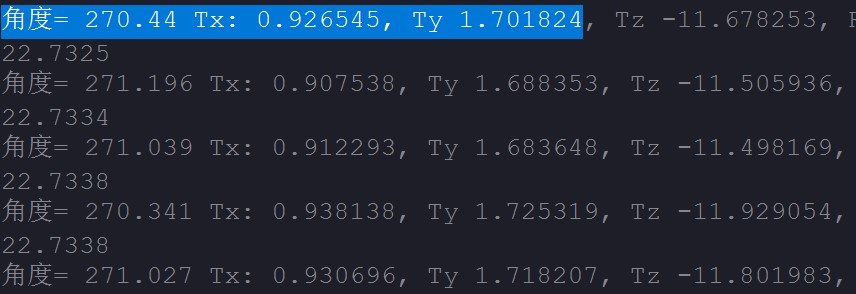
RE: 在AprilTag3D定位中,在同一点进行旋转为什么测得的值差距很大,转化为实际距离误差更大?发布在 OpenMV Cam
@kidswong999 现在测的这个点的坐标是(0,0,z),旋转OpenMV和旋转April Tag得到的结果不应该都一样吗
打算固定AprilTag,旋转OpenMV来进行 -
RE: 在AprilTag3D定位中,在同一点进行旋转为什么测得的值差距很大,转化为实际距离误差更大?发布在 OpenMV Cam
没有报错,用的示例里给的代码,就是同一点的测量结果,旋转OpenMV之后的结果不一样