不对啊,大哥,例程上驱动是tb6612,我接的是l298n,一个l298n一共四个out,out1、out2接一个电机的正负,out3、out4接另一个电机的正负,用两块就行了,跟追小球的小车例程代码接线不就不一样了吗,那那个代码不就用不了。。。
4
4gud 发布的帖子
-
RE: pid控制发布在 OpenMV Cam
-
RE: pid控制发布在 OpenMV Cam
大哥,你的意思是追小球的小车代码不变,四个轮子,左边两个轮子并联到一块,右边两个轮子并联到一块,就直接可以了吗。。
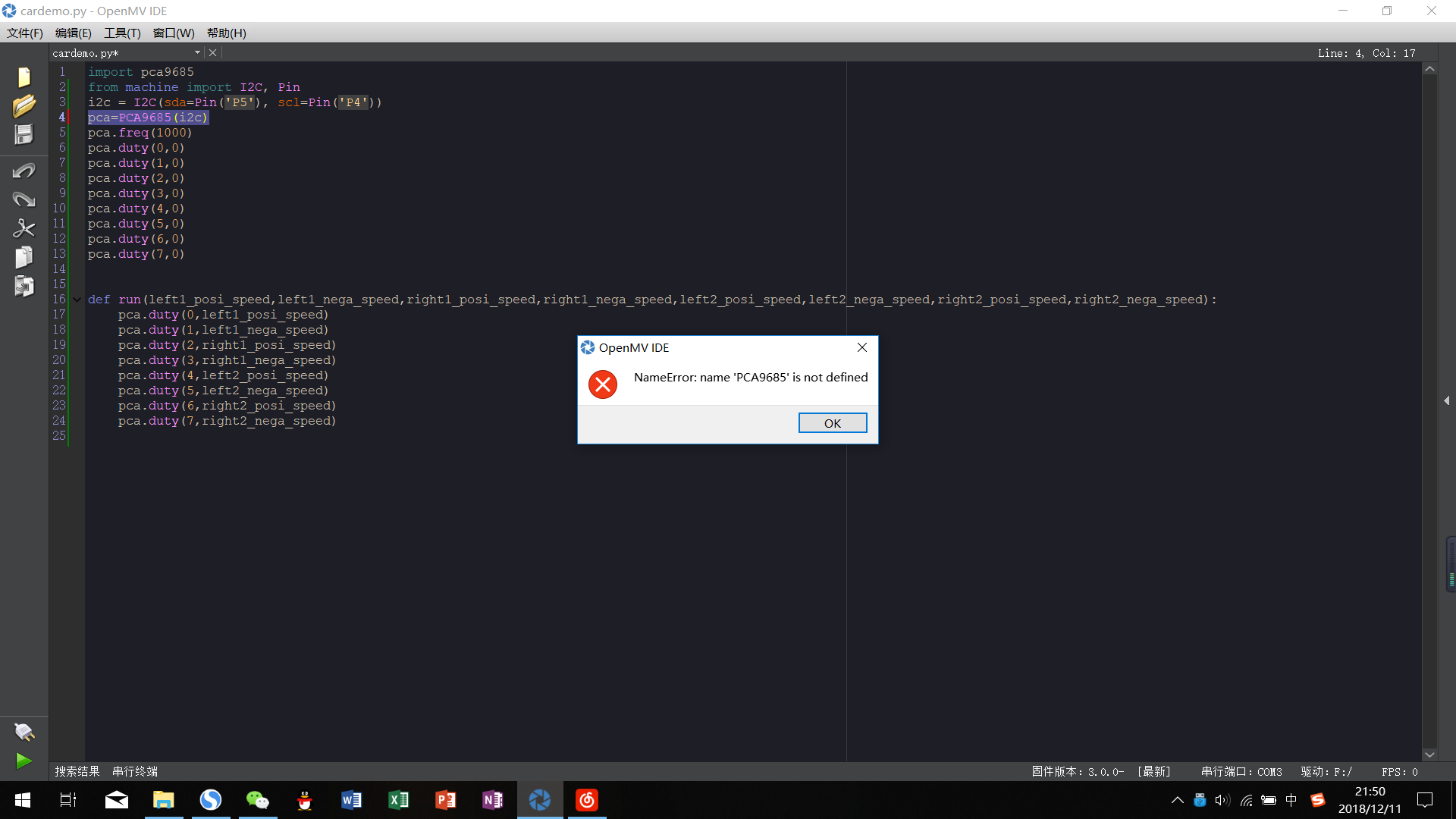
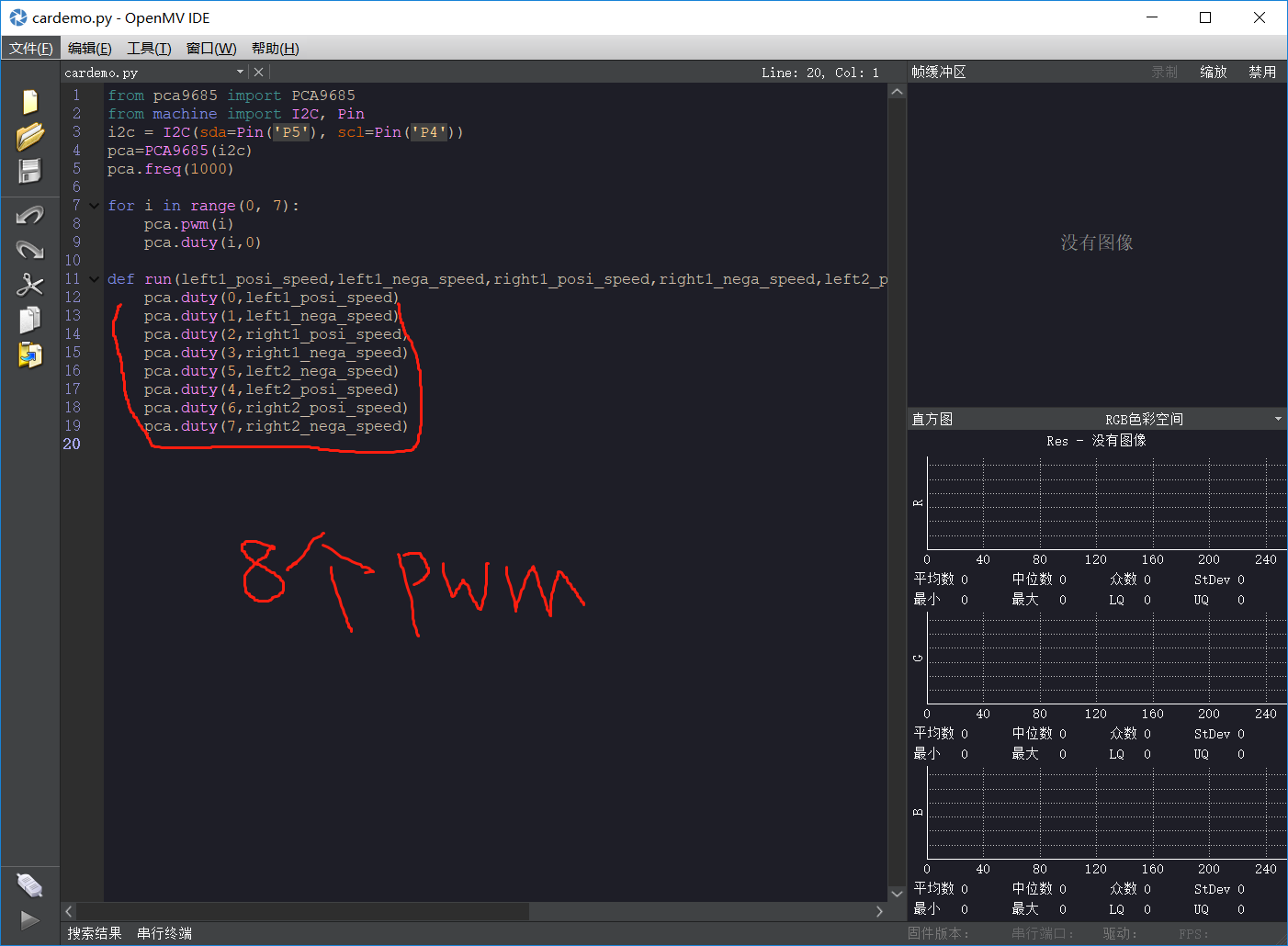
因为我用了8个pwm,openmv的口不够用,我又加了一个pca9685模块,现在在纠结pid怎么改。。 -
pid控制发布在 OpenMV Cam
追小球的小车这个例程中main.py里面,有两个参数,x_pid和h_pid表示速度和方向,最后输出card.run(-h_output-x_output,-h_output+x_output)和car.py中def run(left_speed, right_speed)对应。
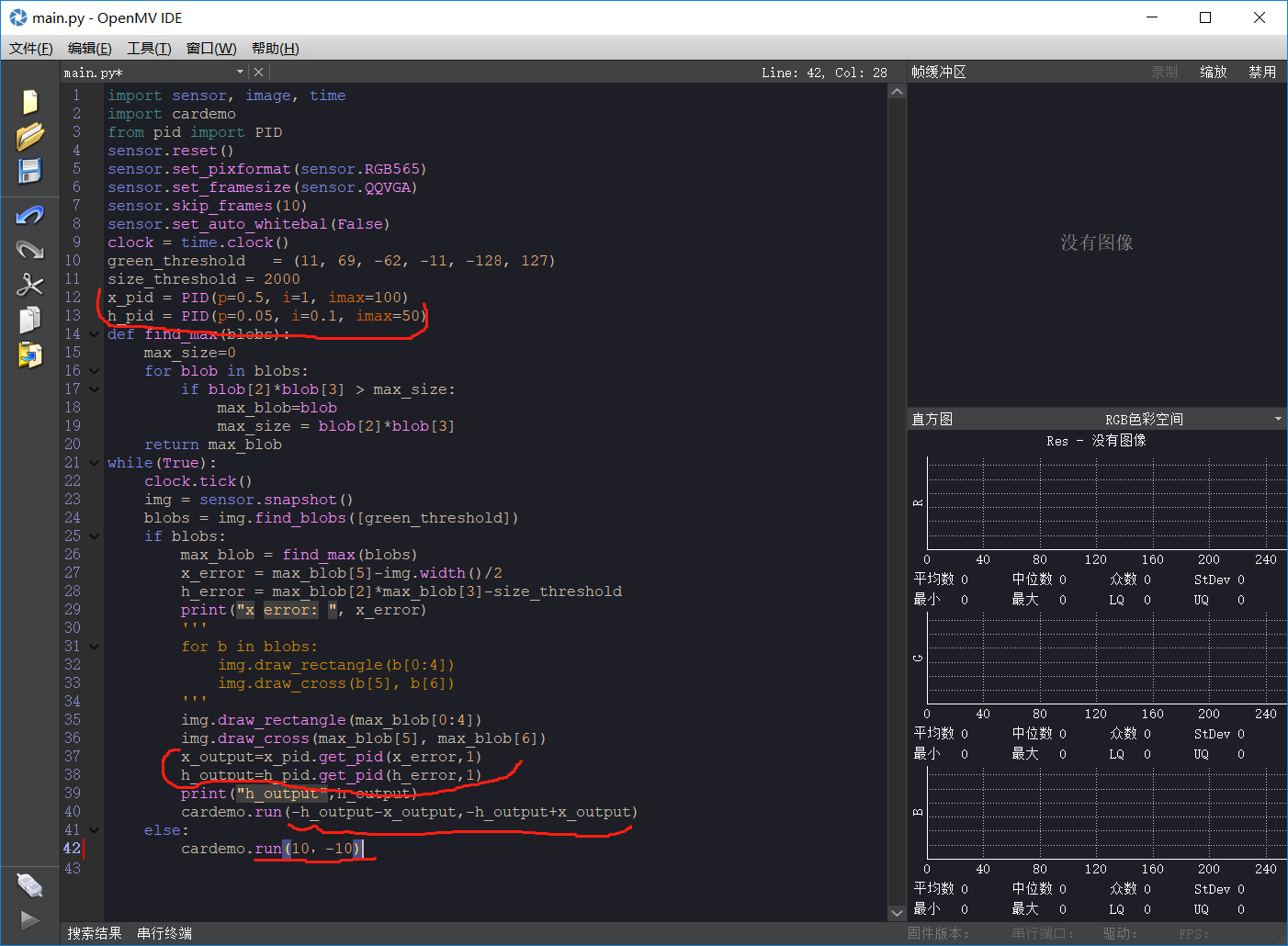
我想请问一下,四个轮子的车,也就是8个pwm控制的,一个轮子两个pwm,一个正,一个负,一共8个,那么pid的参数如何更改和输出呢
拜托了! -
pca9685控制直流电机,原来的Servos类如何更改呢?发布在 OpenMV Cam
教程上的pca9685是控制舵机的,写了一个PCA9685类和一个Servos类,然后在main函数里写了servo=Servos(i2c,address=0x40,freq=50,min_us=650,max_us=2800,degrees=180)
控制舵机使用了上面几个参数,如果是控制直流电机的话,Servos类应该如何更改参数呢 -
引脚不够用,pwm定时器与感光元件冲突发布在 OpenMV Cam
2个L298N驱动4个电机,需要8个PWM引脚
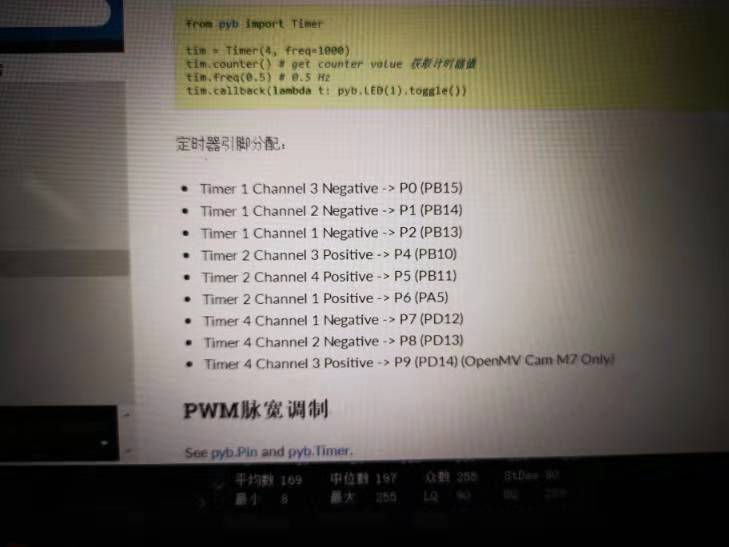
本人使用了P0、P1、P2、P4、P5、P6、P7、P9,结果出现了OSError:Pixel format is not supported的情况。有点方。查找了论坛,知道是定时器1冲突。

我想问一下,一共就这几个口,定时器1不使用的话,怎么办。。。
还想问一下,这到底有几个定时器,在中文文档里没有看见定时器3、定时器5、定时器6啊,最后,我是小白,希望大家帮帮我。 -
RE: ‘追小球的小车’例程按照视频操作,只有一个轮子转???发布在 OpenMV Cam
car.run(100,100)左边轮子转,转速较快,car.run(20,100)左边轮子转,转速稍慢,
car.run(0,100)两个轮子都不转
car.run(100,任意数)左边轮子转,转速较快对换驱动板左右电机连线
car.run(100,100)右边轮子转,转速较快,
car.run(20,100)右边轮子转,转速稍慢,
car.run(0,100)两个轮子都不转
car.run(100,任意数)右边轮子转,转速较快????用的例程官方程序????
-
RE: ‘追小球的小车’例程按照视频操作,只有一个轮子转???发布在 OpenMV Cam
car.run(100,100)左边轮子转,转速较快,car.run(20,100)左边轮子转,转速稍慢,
car.run(0,100)两个轮子都不转对换驱动板左右电机连线,
car.run(100,100)右边轮子转,转速较快,
car.run(100,20)右边轮子转,转速稍慢,
car.run(100,0)两个轮子都不转????用的例程官方程序????
-
‘追小球的小车’例程按照视频操作,只有一个轮子转???发布在 OpenMV Cam
买的那个‘追小球的小车’散件,回来按照视频教程操作,但是只有以一个轮子转,开始以为左边电机坏了,后来把两边驱动板的线对换,左边又可以转了,右边不转了,程序拷的就是例程上的,想不明白,求解答,急