不对啊,大哥,例程上驱动是tb6612,我接的是l298n,一个l298n一共四个out,out1、out2接一个电机的正负,out3、out4接另一个电机的正负,用两块就行了,跟追小球的小车例程代码接线不就不一样了吗,那那个代码不就用不了。。。
4
4gud
@4gud
0
声望
17
楼层
793
资料浏览
0
粉丝
0
关注
4gud 发布的帖子
-
RE: pid控制发布在 OpenMV Cam
-
RE: pid控制发布在 OpenMV Cam
大哥,你的意思是追小球的小车代码不变,四个轮子,左边两个轮子并联到一块,右边两个轮子并联到一块,就直接可以了吗。。
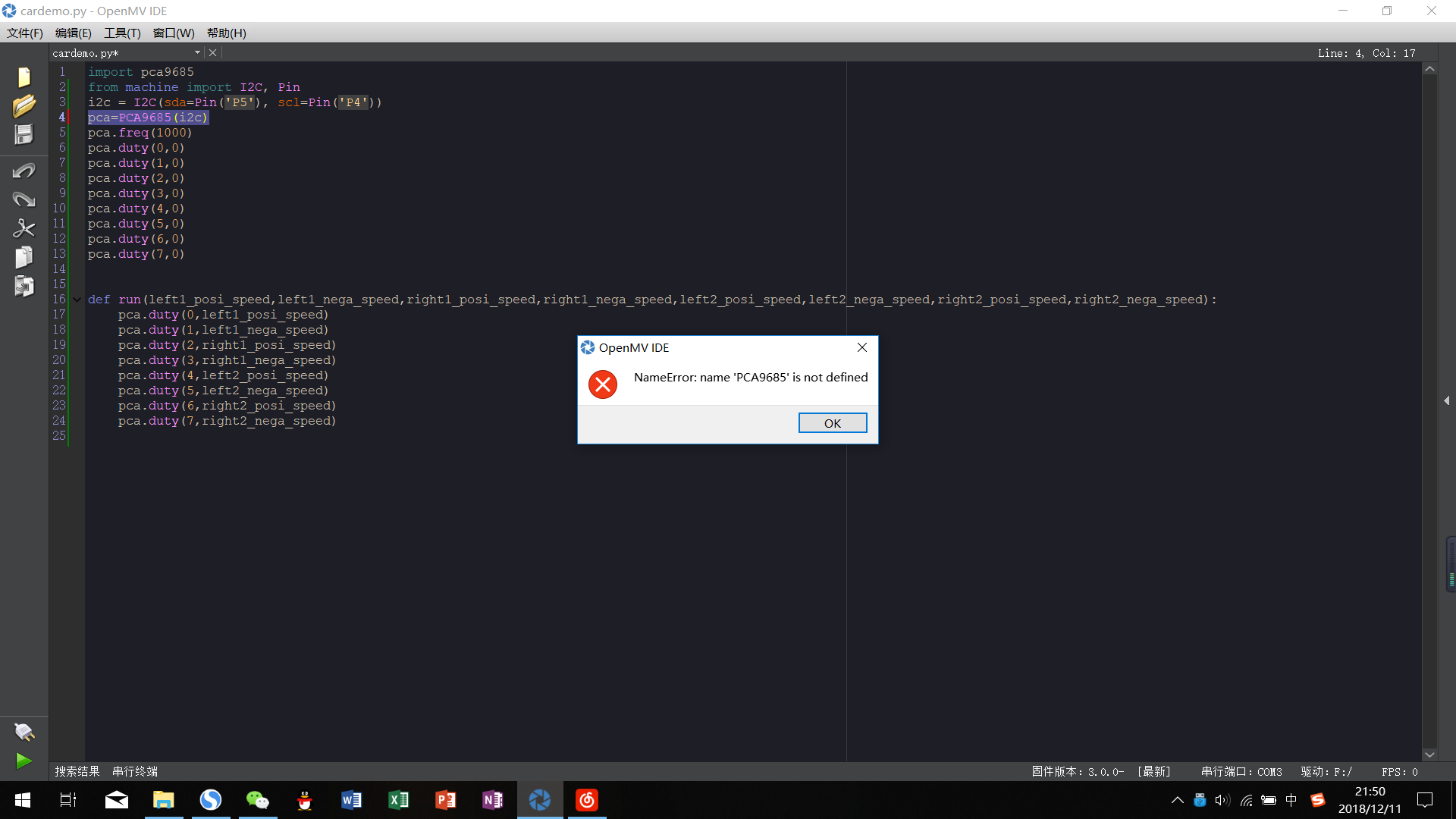
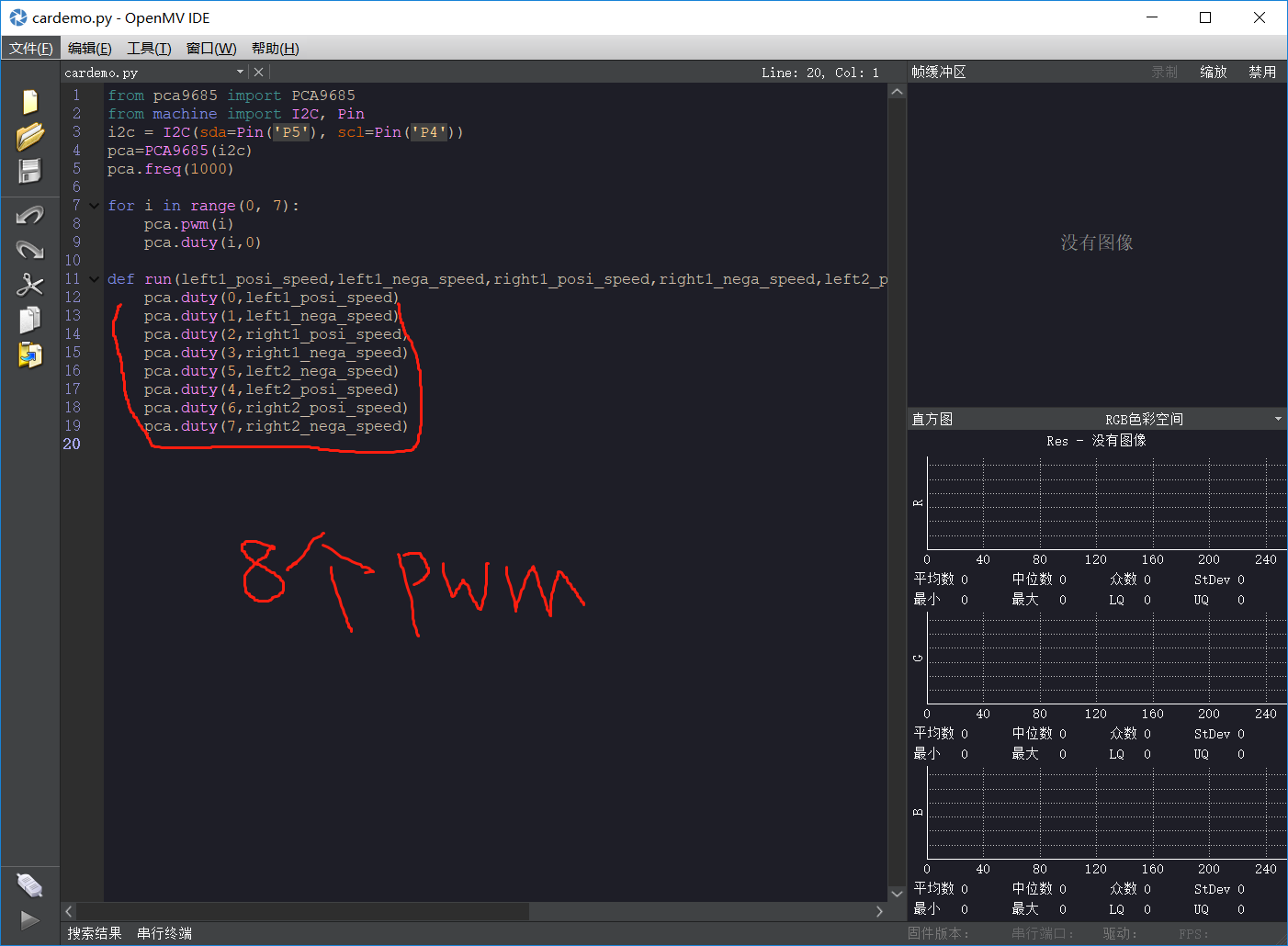
因为我用了8个pwm,openmv的口不够用,我又加了一个pca9685模块,现在在纠结pid怎么改。。 -
pid控制发布在 OpenMV Cam
追小球的小车这个例程中main.py里面,有两个参数,x_pid和h_pid表示速度和方向,最后输出card.run(-h_output-x_output,-h_output+x_output)和car.py中def run(left_speed, right_speed)对应。
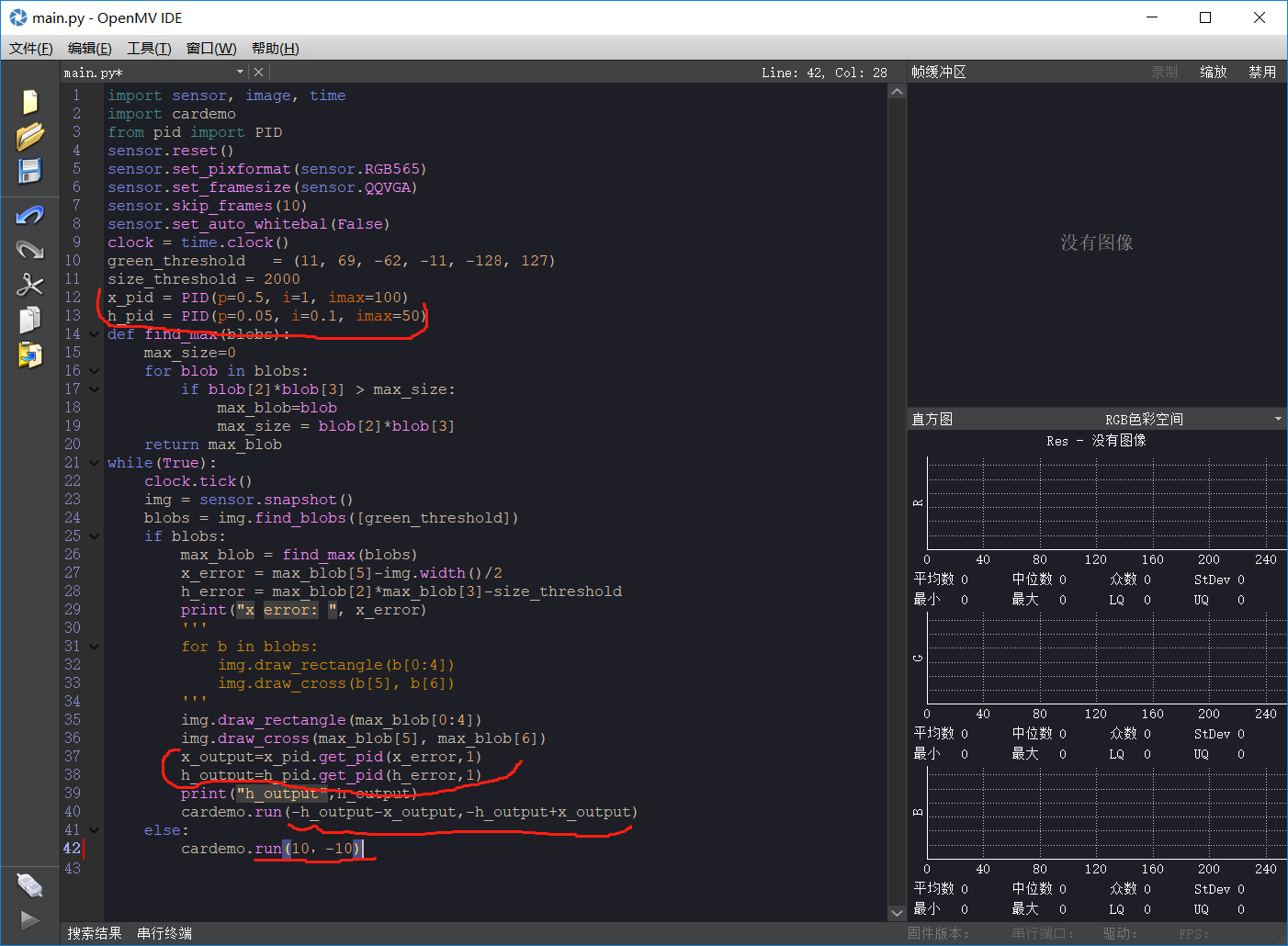
我想请问一下,四个轮子的车,也就是8个pwm控制的,一个轮子两个pwm,一个正,一个负,一共8个,那么pid的参数如何更改和输出呢
拜托了!