运行示例程序Servo-shield程序时,报错OSError:[Error 110]ETIMEDOUT
-
OpenMV已经与PCA9685硬件连接,运行Servo-shield程序时,但是会报错OSError:[Error 110]ETIMEDOUT,该如何解决
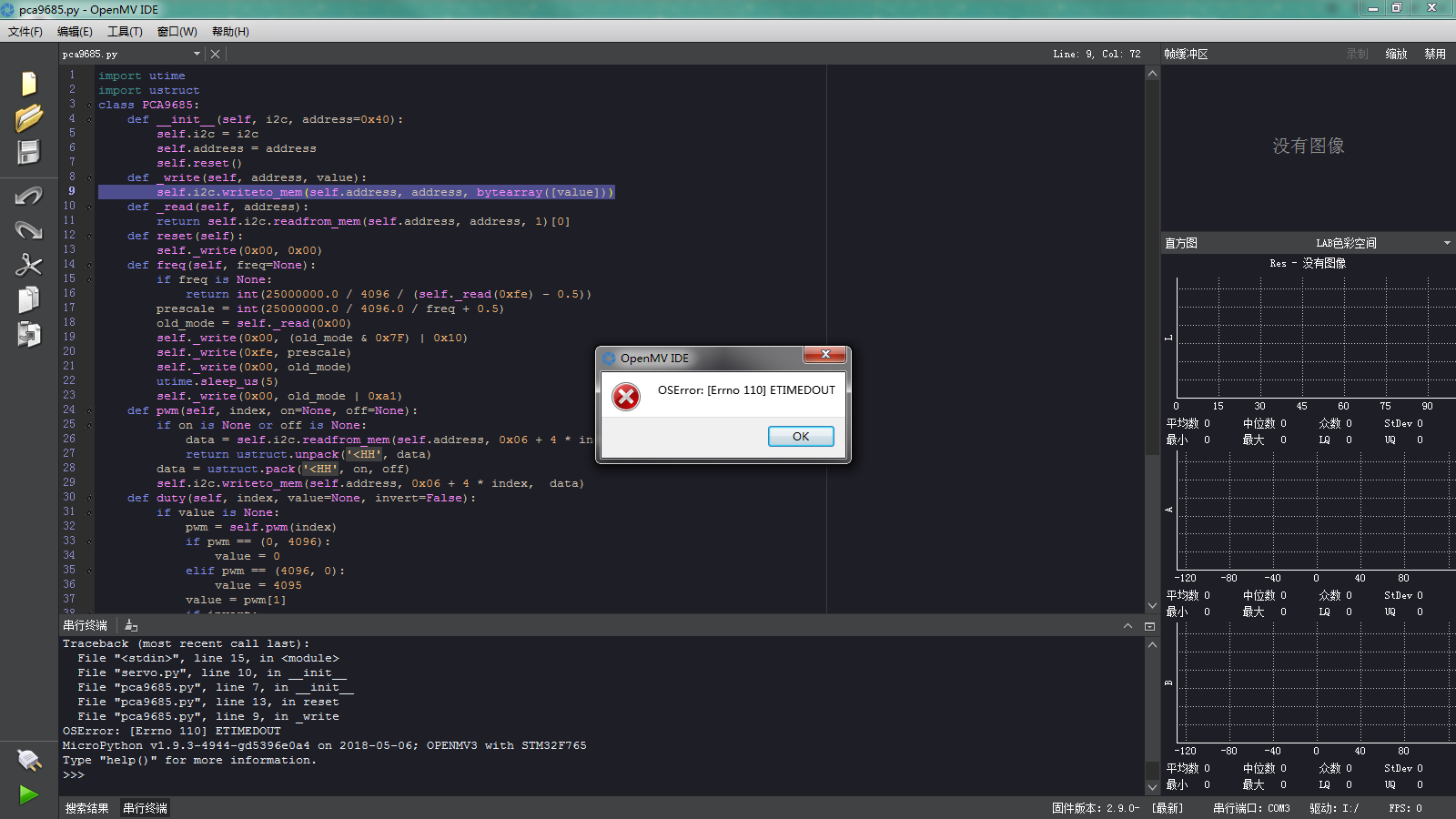
mian.py# Servo Shield Example. # # This example demonstrates the servo shield. Please follow these steps: # # 1. Connect a servo to any PWM output. # 2. Connect a 3.7v battery (or 5V source) to VIN and GND. # 3. Copy pca9685.py and servo.py to OpenMV and reset it. # 4. Connect and run this script in the IDE. import time from servo import Servos from machine import I2C, Pin i2c = I2C(sda=Pin('P5'), scl=Pin('P4')) servo = Servos(i2c, address=0x40, freq=50, min_us=650, max_us=2800, degrees=180) while True: for i in range(0, 8): servo.position(i, 0) time.sleep(500) for i in range(0, 8): servo.position(i, 180) time.sleep(500)import utime import ustruct class PCA9685: def __init__(self, i2c, address=0x40): self.i2c = i2c self.address = address self.reset() def _write(self, address, value): self.i2c.writeto_mem(self.address, address, bytearray([value])) def _read(self, address): return self.i2c.readfrom_mem(self.address, address, 1)[0] def reset(self): self._write(0x00, 0x00) def freq(self, freq=None): if freq is None: return int(25000000.0 / 4096 / (self._read(0xfe) - 0.5)) prescale = int(25000000.0 / 4096.0 / freq + 0.5) old_mode = self._read(0x00) self._write(0x00, (old_mode & 0x7F) | 0x10) self._write(0xfe, prescale) self._write(0x00, old_mode) utime.sleep_us(5) self._write(0x00, old_mode | 0xa1) def pwm(self, index, on=None, off=None): if on is None or off is None: data = self.i2c.readfrom_mem(self.address, 0x06 + 4 * index, 4) return ustruct.unpack('<HH', data) data = ustruct.pack('<HH', on, off) self.i2c.writeto_mem(self.address, 0x06 + 4 * index, data) def duty(self, index, value=None, invert=False): if value is None: pwm = self.pwm(index) if pwm == (0, 4096): value = 0 elif pwm == (4096, 0): value = 4095 value = pwm[1] if invert: value = 4095 - value return value if not 0 <= value <= 4095: raise ValueError("Out of range") if invert: value = 4095 - value if value == 0: self.pwm(index, 0, 4096) elif value == 4095: self.pwm(index, 4096, 0) else: self.pwm(index, 0, value)import pca9685 import math class Servos: def __init__(self, i2c, address=0x40, freq=50, min_us=600, max_us=2400, degrees=180): self.period = 1000000 / freq self.min_duty = self._us2duty(min_us) self.max_duty = self._us2duty(max_us) self.degrees = degrees self.freq = freq self.pca9685 = pca9685.PCA9685(i2c, address) self.pca9685.freq(freq) def _us2duty(self, value): return int(4095 * value / self.period) def position(self, index, degrees=None, radians=None, us=None, duty=None): span = self.max_duty - self.min_duty if degrees is not None: duty = self.min_duty + span * degrees / self.degrees elif radians is not None: duty = self.min_duty + span * radians / math.radians(self.degrees) elif us is not None: duty = self._us2duty(us) elif duty is not None: pass else: return self.pca9685.duty(index) duty = min(self.max_duty, max(self.min_duty, int(duty))) self.pca9685.duty(index, duty) def release(self, index): self.pca9685.duty(index, 0)
-
- 可能没连接好
- 可能硬件不对
-
@kidswong999我开始怀疑你们这个程序有问题,这个程序没有问题是吗?你们测试过这个程序吗?
-
PCA9685的模块是不一样的。
它是可以配置I2C地址的。
如果不是官方的配套扩展板。
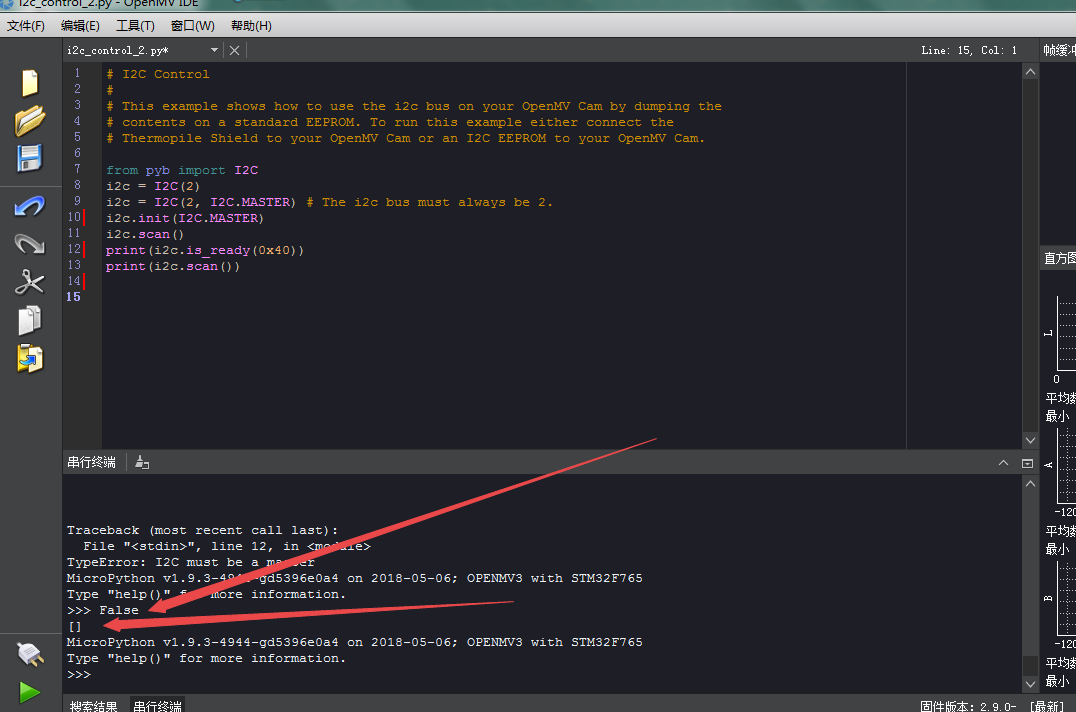
你可以i2c.scan()看一下地址
-
@kidswong999 我已经扫描地址了,但是返回的结果的是空的,我是不是哪里写错了
-
注意openmv要和pca965共地