这个代码之前用的一直好好的 吃顿饭回来就成这样了 走的时候线也拔掉了,求看看怎么解决
-
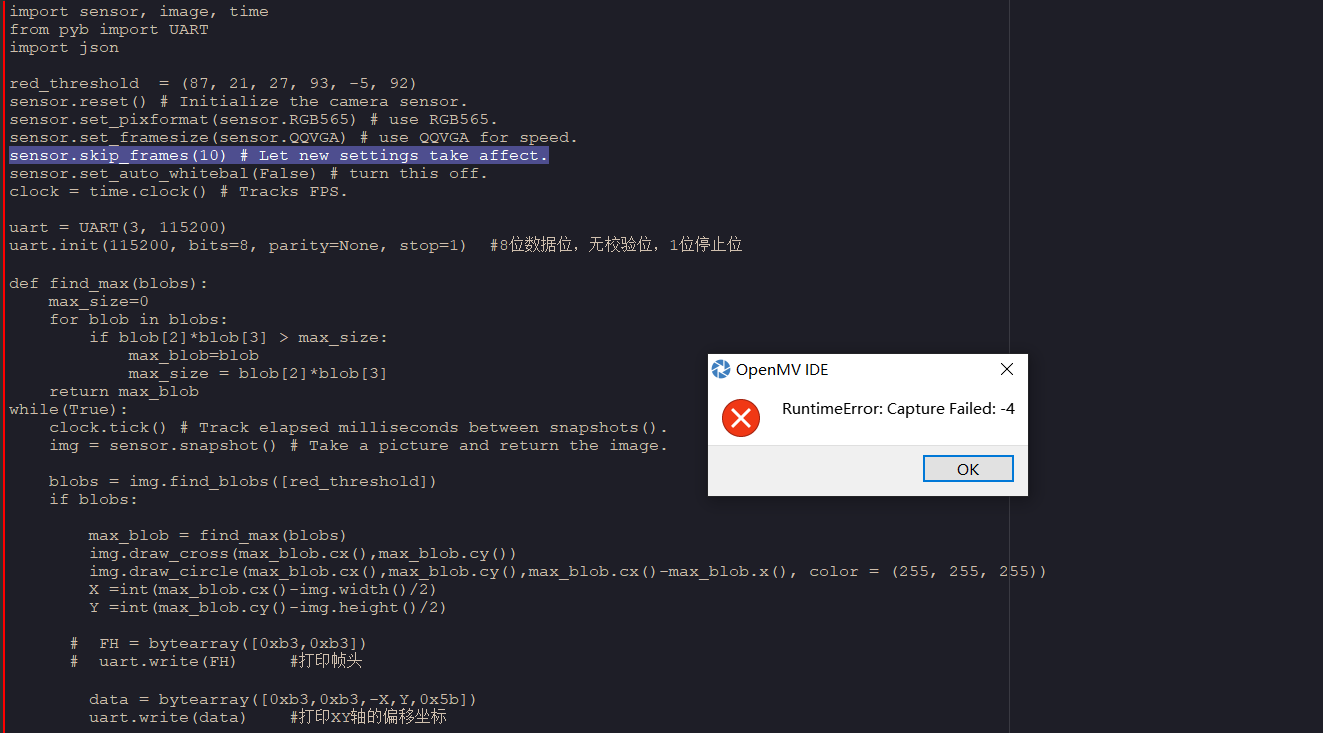
import sensor, image, time from pyb import UART import json red_threshold = (87, 21, 27, 93, -5, 92) sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.RGB565) # use RGB565. sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed. sensor.skip_frames(10) # Let new settings take affect. sensor.set_auto_whitebal(False) # turn this off. clock = time.clock() # Tracks FPS. uart = UART(3, 115200) uart.init(115200, bits=8, parity=None, stop=1) #8位数据位,无校验位,1位停止位 def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob=blob max_size = blob[2]*blob[3] return max_blob while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() # Take a picture and return the image. blobs = img.find_blobs([red_threshold]) if blobs: max_blob = find_max(blobs) img.draw_cross(max_blob.cx(),max_blob.cy()) img.draw_circle(max_blob.cx(),max_blob.cy(),max_blob.cx()-max_blob.x(), color = (255, 255, 255)) X =int(max_blob.cx()-img.width()/2) Y =int(max_blob.cy()-img.height()/2) # FH = bytearray([0xb3,0xb3]) # uart.write(FH) #打印帧头 data = bytearray([0xb3,0xb3,-X,Y,0x5b]) uart.write(data) #打印XY轴的偏移坐标 print("X轴偏移坐标 : ",-X) print("Y轴偏移坐标 : ",Y) print("帧率 : ",clock.fps())请在这里粘贴代码
-

-
可能是硬件的问题,联系售后维修吧。