串口通信输出乱码,波特率,串口都没错,请问是哪里出错了呢?
-
import sensor, image, time,math import json import ustruct from pid import PID from pyb import Servo from pyb import UART pan_servo=Servo(1) tilt_servo=Servo(2) pan_servo.calibration(500,2500,500) tilt_servo.calibration(500,2500,500) green_threshold = (52, 98, -13, -25, -26, 5) pan_pid = PID(p=0.07, i=0, imax=90) #脱机运行或者禁用图像传输,使用这个PID tilt_pid = PID(p=0.05, i=0, imax=90) #脱机运行或者禁用图像传输,使用这个PID #pan_pid = PID(p=0.1, i=0, imax=90)#在线调试使用这个PID #tilt_pid = PID(p=0.1, i=0, imax=90)#在线调试使用这个PID sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.RGB565) # use RGB565. sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed. sensor.skip_frames(10) # Let new settings take affect. sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # turn this off. clock = time.clock() # Tracks FPS. def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob=blob max_size = blob[2]*blob[3] return max_blob def sending_data(cx,cy): global uart; #frame=[0x2C,18,cx%0xff,int(cx/0xff),cy%0xff,int(cy/0xff),0x5B]; #data = bytearray(frame) data = ustruct.pack("<bbhhb", #格式为俩个字符俩个短整型(2字节) 0x2C, #帧头1 0x12, #帧头2 int(cx), # up sample by 4 #数据1 int(cy), # up sample by 4 #数据2 0x5B) uart.write(data); #必须要传入一个字节数组 def recive_data(): global uart if uart.any(): tmp_data = uart.readline(); print(tmp_data) uart = UART(3, 115200) uart.init(115200, bits=8, parity=None, stop=1) #8位数据位,无校验位,1位停止位 while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() # Take a picture and return the image. blobs = img.find_blobs([green_threshold], area_threshold=150); if blobs: #如果找到了目标颜色 max_b = find_max(blobs); # Draw a rect around the blob. img.draw_rectangle(max_b[0:4]) # rect #用矩形标记出目标颜色区域 img.draw_cross(max_b[5], max_b[6]) # cx, cy img.draw_cross(160, 120) # 在中心点画标记 #在目标颜色区域的中心画十字形标记 cx=max_b[5]; cy=max_b[6]; img.draw_line((160,120,cx,cy), color=(127)); #img.draw_string(160,120, "(%d, %d)"%(160,120), color=(127)); img.draw_string(cx, cy, "(%d, %d)"%(cx,cy), color=(127)); sending_data(cx,cy); #发送点位坐标 recive_data(); pan_output=pan_pid.get_pid(pan_error,1)/2 tilt_output=tilt_pid.get_pid(tilt_error,1) pan_servo.angle(pan_servo.angle()+pan_output) tilt_servo.angle(tilt_servo.angle()-tilt_output)
-
哪里乱码?是OpenMV的接收乱码?还是其他设备接收乱码?
用什么设备检测的?是串口助手吗?
-

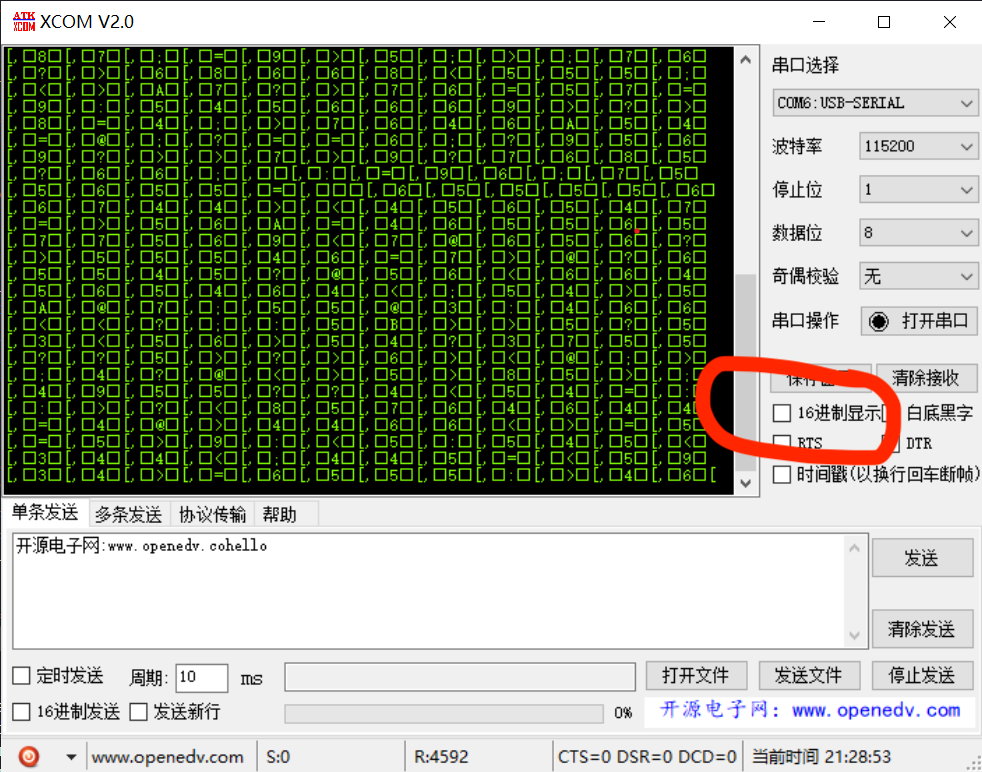
用XCOM V2.0
串口助手收到数据是乱码
-
原因:你是按照二进制发送的,串口助手用的ascii显示的。
解决办法:串口助手使用16进制显示。
-
那请问怎么才能使串口助手输出数字坐标呢?代码该如何修改?
谢谢!
-