系统迁移中,暂时无法访问,所有数据会迁移到新的网站。
OpenMV VSCode 扩展发布了,在插件市场直接搜索OpenMV就可以安装
如果有产品硬件故障问题,比如无法开机,论坛很难解决。可以直接找售后维修。
发帖子之前,请确认看过所有的视频教程,https://singtown.com/learn/ 和所有的上手教程http://book.openmv.cc/
每一个新的提问,单独发一个新帖子
帖子需要目的,你要做什么?
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
必看:玩转星瞳论坛了解一下图片上传,代码格式等问题。
每时间间隔后获取色块当下时间的中心坐标
-
如果直接在条件语句后面添加延时函数的话,发现坐标是会根据延时参数延迟相应时间,不过视图图像也会跟着卡顿延迟,问,有什么法子,可实现视图呈现实时动态,而坐标打印却是保持有时间间隔的呢?
@kidswong999import sensor, image, time # 颜色追踪的例子,一定要控制环境的光,保持光线是稳定的。 green_threshold = (57, 100, -128, -32, -128, 127) #设置绿色的阈值,括号里面的数值分别是L A B 的最大值和最小值(minL, maxL, minA, # maxA, minB, maxB),LAB的值在图像左侧三个坐标图中选取。如果是灰度图,则只需 #设置(min, max)两个数字即可。 sensor.reset() # 初始化摄像头 sensor.set_pixformat(sensor.RGB565) # 格式为 RGB565. sensor.set_framesize(sensor.QQVGA) # 使用 QQVGA 速度快一些 sensor.skip_frames(10) # 跳过10帧,使新设置生效 sensor.set_auto_whitebal(False) #关闭白平衡。白平衡是默认开启的,在颜色识别中,一定要关闭白平衡。 clock = time.clock() # 追踪帧率 while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot().lens_corr(strength = 1.7, zoom = 1.0) blobs = img.find_blobs([green_threshold]) if blobs: #如果找到了目标颜色 for b in blobs: #迭代找到的目标颜色区域 # Draw a rect around the blob. img.draw_rectangle(b[0:4]) # rect #用矩形标记出目标颜色区域 img.draw_cross(b[5], b[6]) # cx, cy #在目标颜色区域的中心画十字形标记 # output_str="[%d,%d]" % (find_blobs.cx(),find_blobs.cy()) #方式1 # print(clock.fps()) # 注意: 你的OpenMV连到电脑后帧率大概为原来的一半 print("(x,y)=",(b[5],b[6])) time.sleep(1500)
-
判断一下间隔时间
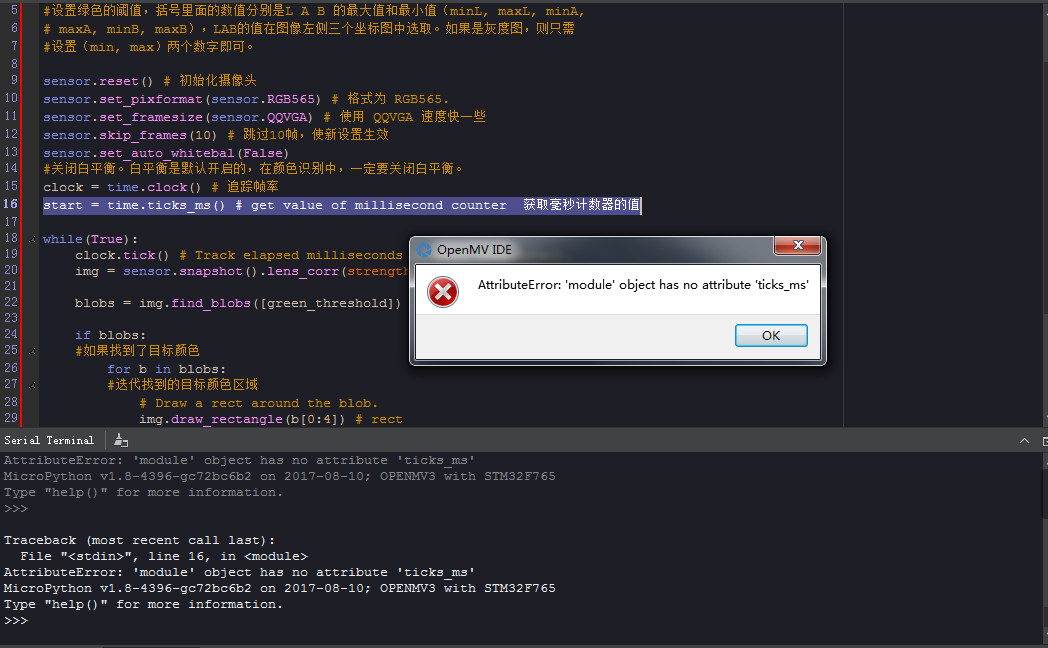
import sensor, image, time # 颜色追踪的例子,一定要控制环境的光,保持光线是稳定的。 green_threshold = (57, 100, -128, -32, -128, 127) #设置绿色的阈值,括号里面的数值分别是L A B 的最大值和最小值(minL, maxL, minA, # maxA, minB, maxB),LAB的值在图像左侧三个坐标图中选取。如果是灰度图,则只需 #设置(min, max)两个数字即可。 sensor.reset() # 初始化摄像头 sensor.set_pixformat(sensor.RGB565) # 格式为 RGB565. sensor.set_framesize(sensor.QQVGA) # 使用 QQVGA 速度快一些 sensor.skip_frames(10) # 跳过10帧,使新设置生效 sensor.set_auto_whitebal(False) #关闭白平衡。白平衡是默认开启的,在颜色识别中,一定要关闭白平衡。 clock = time.clock() # 追踪帧率 start = time.ticks_ms() # get value of millisecond counter 获取毫秒计数器的值 while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot().lens_corr(strength = 1.7, zoom = 1.0) blobs = img.find_blobs([green_threshold]) if blobs: #如果找到了目标颜色 for b in blobs: #迭代找到的目标颜色区域 # Draw a rect around the blob. img.draw_rectangle(b[0:4]) # rect #用矩形标记出目标颜色区域 img.draw_cross(b[5], b[6]) # cx, cy #在目标颜色区域的中心画十字形标记 delta = time.ticks_diff(time.ticks_ms(), start)#计算间隔时间 if delta > 1500: start = time.ticks_ms() # 更新时间 print("(x,y)=",(b[5],b[6])) #串口操作在这里
-
@kidswong999 小小智,运行了以上代码后,出现这个,是需要另外再定义过吗?
-
我改了一下函数,测试了一下是没问题的
import sensor, image, time import pyb # 颜色追踪的例子,一定要控制环境的光,保持光线是稳定的。 green_threshold = (57, 100, -128, -32, -128, 127) #设置绿色的阈值,括号里面的数值分别是L A B 的最大值和最小值(minL, maxL, minA, # maxA, minB, maxB),LAB的值在图像左侧三个坐标图中选取。如果是灰度图,则只需 #设置(min, max)两个数字即可。 sensor.reset() # 初始化摄像头 sensor.set_pixformat(sensor.RGB565) # 格式为 RGB565. sensor.set_framesize(sensor.QQVGA) # 使用 QQVGA 速度快一些 sensor.skip_frames(10) # 跳过10帧,使新设置生效 sensor.set_auto_whitebal(False) #关闭白平衡。白平衡是默认开启的,在颜色识别中,一定要关闭白平衡。 clock = time.clock() # 追踪帧率 start = pyb.millis() # get value of millisecond counter 获取毫秒计数器的值 while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot().lens_corr(strength = 1.7, zoom = 1.0) blobs = img.find_blobs([green_threshold]) if blobs: #如果找到了目标颜色 for b in blobs: print(pyb.millis()) #迭代找到的目标颜色区域 # Draw a rect around the blob. img.draw_rectangle(b[0:4]) # rect #用矩形标记出目标颜色区域 img.draw_cross(b[5], b[6]) # cx, cy #在目标颜色区域的中心画十字形标记 delta = pyb.elapsed_millis(start)#计算间隔时间 if delta > 1500: start = pyb.millis() # 更新时间 print("(x,y)=",(b[5],b[6])) #串口操作在这里
-
@kidswong999 谢谢小小智哈~