怎么能很好的同时实现颜色识别和直线识别?
-
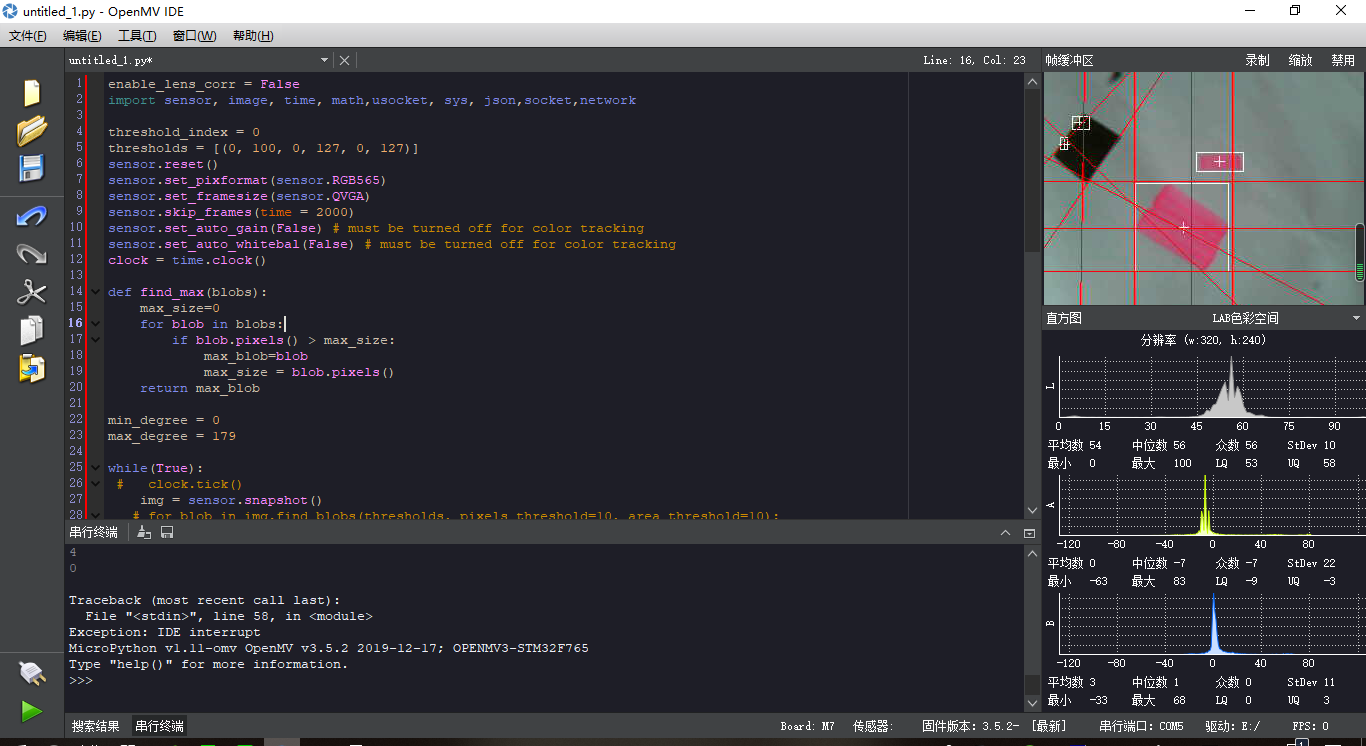
进行的是红色的颜色识别,单独进行颜色识别或直线识别的话,是可以完成的,可是把代码放在一起,无论颜色识别还是直线识别都会特别乱,识别出一些不必要的东西
enable_lens_corr = False import sensor, image, time, math,usocket, sys, json,socket,network threshold_index = 0 thresholds = [(0, 100, 0, 127, 0, 127)] sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking clock = time.clock() def find_max(blobs): max_size=0 for blob in blobs: if blob.pixels() > max_size: max_blob=blob max_size = blob.pixels() return max_blob min_degree = 0 max_degree = 179 while(True): # clock.tick() img = sensor.snapshot() # for blob in img.find_blobs(thresholds, pixels_threshold=10, area_threshold=10): blobs = img.find_blobs(thresholds, pixels_threshold=20, area_threshold=20, merge=True) if blobs: max_blob=find_max(blobs ) for blob in blobs: if blob.code(): img.draw_cross(blob.cx(), blob.cy()) img.draw_rectangle(blob.rect()) if blob.cx() > img.width()/2: print(03) elif blob.cx() < img.width()/2: print(04) else: print(00) if blob.cy() < img.height()/2: print(01) else: print(00) if enable_lens_corr: img.lens_corr(1.8) for l in img.find_lines(threshold = 1000, theta_margin = 25, rho_margin = 25): if (min_degree <= l.theta()) and (l.theta() <= max_degree): img.draw_line(l.line(), color = (255, 0, 0)) if l.x1() > img.height()/2: print(16) else: print(16)
-
draw需要放在最后面,否则找直线会把手动画的框识别到。