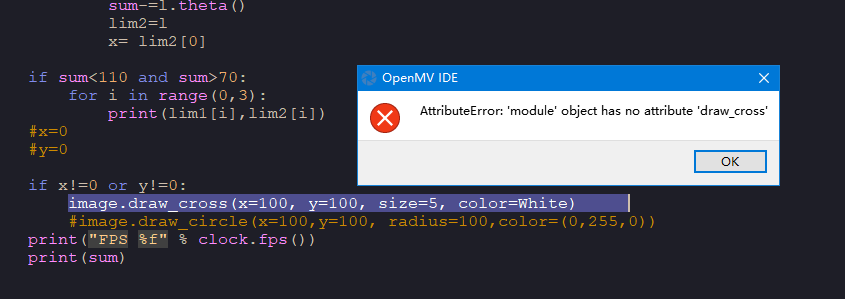
例程上改的(算是大改)报错AttributeError怎么解决
-
AttributeError:'module' object has no attribute 'draw_circle'
识别自己在直线例程
这个例子展示了如何在图像中查找线条。对于在图像中找到的每个线对象,
都会返回一个包含线条旋转的线对象。
注意:线条检测是通过使用霍夫变换完成的:
http://en.wikipedia.org/wiki/Hough_transform
请阅读以上关于“theta”和“rho”的更多信息。
find_lines()找到无限长度的线。使用find_line_segments()
来查找非无限线。
enable_lens_corr = False # turn on for straighter lines...
import sensor, image, time
lim1=[1,2,3,4]
lim2=[1,2,3,4]
sum=0
flag=0
i=0
li=(0,1,2,3,)
x=0
y=0
zan=()
sensor.reset()sensor.set_pixformat(sensor.RGB565) # grayscale is faster
sensor.set_framesize(sensor.QQVGA)
sensor.skip_frames(time = 2000)
clock = time.clock()
所有的线对象都有一个
theta()方法来获取它们的旋转角度。您可以根据旋转角度来过滤线条。
min_degree = 0
max_degree = 179
所有线段都有
x1(),y1(),x2(), andy2()方法来获得他们的终点一个
line()方法来获得所有上述的四个元组值,可用于draw_line().while(True):
clock.tick() img = sensor.snapshot() if enable_lens_corr: img.lens_corr(1.8) # for 2.8mm lens... # `threshold` controls how many lines in the image are found. Only lines with # edge difference magnitude sums greater than `threshold` are detected... # `threshold`控制从霍夫变换中监测到的直线。只返回大于或等于阈值的 # 直线。应用程序的阈值正确值取决于图像。注意:一条直线的大小是组成 # 直线所有索贝尔滤波像素大小的总和。 # `theta_margin`和`rho_margin`控件合并相似的直线。如果两直线的 # theta和ρ值差异小于边际,则它们合并。 sum=0 flag=0; for l in img.find_lines(threshold = 3000, y_stride=2,y_stride=2,theta_margin = 25, rho_margin = 25): if (min_degree <= l.theta()) and (l.theta() <= max_degree): img.draw_line(l.line(), color = (255, 0, 0)) # print(l) if flag==0: sum=l.theta() flag=1 lim1=l y= lim1[1] else : sum-=l.theta() lim2=l x= lim2[0] if sum<110 and sum>70: for i in range(0,3): print(lim1[i],lim2[i]) #x=0 #y=0 if x!=0 or y!=0: image.draw_cross(x=100, y=100, size=5, color=White) #image.draw_circle(x=100,y=100, radius=100,color=(0,255,0)) print("FPS %f" % clock.fps()) print(sum)About negative rho values:
A [theta+0:-rho] tuple is the same as [theta+180:+rho].
之前在看了几个帖子要升级固件,特地看了下固件应该是没啥问题
求大佬指点迷津
-
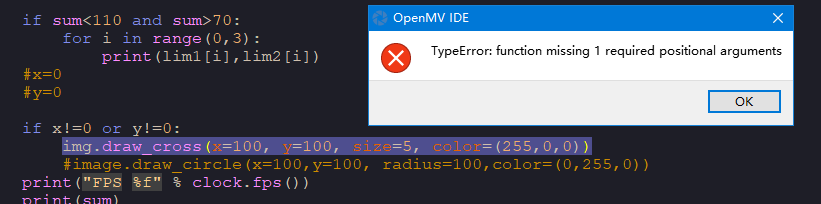
是img.draw_cross,不是image.draw_cross
-
改完后出现了新错误
-