构建函数出现的错误,怎么解决????急急急!
-
线段检测例程
这个例子展示了如何在图像中查找线段。对于在图像中找到的每个线对象,
都会返回一个包含线条旋转的线对象。
find_line_segments()找到有限长度的线(但是很慢)。
Use find_line_segments()找到非无限的线(而且速度很快)。
enable_lens_corr = False # turn on for straighter lines...
import sensor, image, time ,math
sensor.reset()
sensor.set_pixformat(sensor.RGB565) # grayscale is faster
sensor.set_framesize(sensor.QQVGA)
sensor.skip_frames(time = 2000)
clock = time.clock()所有线段都有
x1(),y1(),x2(), andy2()方法来获得他们的终点一个
line()方法来获得所有上述的四个元组值,可用于draw_line().def getlinemax(ls = [])
ml = ls[0]
for l in ls
if (ml[0] < l[0])
ml = l
return mldef gettheta(p1,p2,p3)
v1 = p1 - p2
v2 = p3 - p2
a = (v1[0]*v2[0],v1[1]*v2[1])
b = sqrt(v1[0]*v1[0]+v1[1]*v1[1])*sqrt(v2[0]*v2[0]+v2[1]*v2[1])
return acos(a/b)while(True):
clock.tick()
img = sensor.snapshot()
if enable_lens_corr: img.lens_corr(1.8) # for 2.8mm lens...# `merge_distance`控制附近行的合并。 在0(默认),没有合并。 # 在1处,任何距离另一条线一个像素点的线都被合并...等等, # 因为你增加了这个值。 您可能希望合并线段,因为线段检测会产生大量 # 的线段结果。 # `max_theta_diff` 控制要合并的任何两线段之间的最大旋转差异量。 # 默认设置允许15度。 l1 = [] l2 = [] for l in img_find_segments(merge_distance = 5,max_theta_diff = 5): img.draw_line(l.line() ,color = (255,0,0) num = len(lines) if num == 3 l1.append(line.length()) l2.append(line.line()) zipl = zip(l1,l2) #将识别的线段长度和直线元组绑定 lm = getlinemax(zipl) #得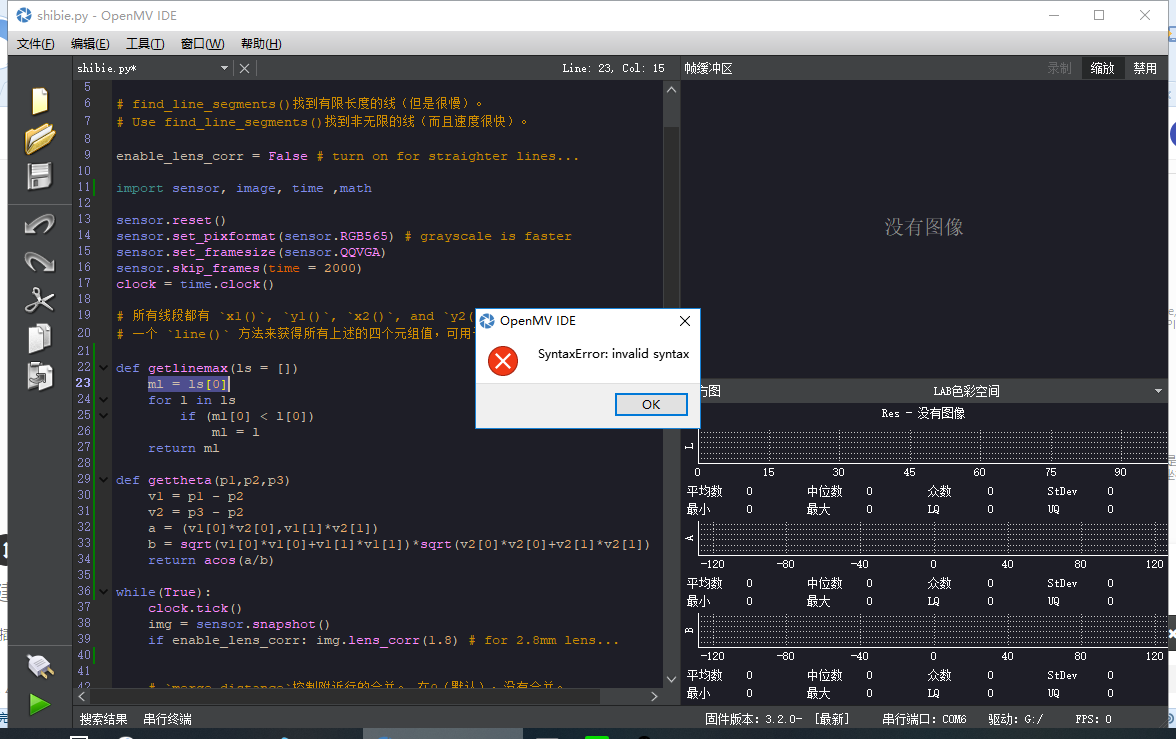请在这里粘贴代码
-
# find_line_segments()找到有限长度的线(但是很慢)。 # Use find_line_segments()找到非无限的线(而且速度很快)。 enable_lens_corr = False # turn on for straighter lines... import sensor, image, time ,math sensor.reset() sensor.set_pixformat(sensor.RGB565) # grayscale is faster sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) clock = time.clock() # 所有线段都有 `x1()`, `y1()`, `x2()`, and `y2()` 方法来获得他们的终点 # 一个 `line()` 方法来获得所有上述的四个元组值,可用于 `draw_line()`. def getlinemax(ls = []) ml = ls[0] for l in ls if (ml[0] < l[0]) ml = l return ml def gettheta(p1,p2,p3) v1 = p1 - p2 v2 = p3 - p2 a = (v1[0]*v2[0],v1[1]*v2[1]) b = sqrt(v1[0]*v1[0]+v1[1]*v1[1])*sqrt(v2[0]*v2[0]+v2[1]*v2[1]) return acos(a/b) while(True): clock.tick() img = sensor.snapshot() if enable_lens_corr: img.lens_corr(1.8) # for 2.8mm lens... # `merge_distance`控制附近行的合并。 在0(默认),没有合并。 # 在1处,任何距离另一条线一个像素点的线都被合并...等等, # 因为你增加了这个值。 您可能希望合并线段,因为线段检测会产生大量 # 的线段结果。 # `max_theta_diff` 控制要合并的任何两线段之间的最大旋转差异量。 # 默认设置允许15度。 l1 = [] l2 = [] for l in img_find_segments(merge_distance = 5,max_theta_diff = 5): img.draw_line(l.line() ,color = (255,0,0) num = len(lines) if num == 3 l1.append(line.length()) l2.append(line.line()) zipl = zip(l1,l2) #将识别的线段长度和直线元组绑定 lm = getlinemax(zipl) #得到最长线段所对应的直线元组 mlength = lm[0] mline = lm[1] if lm[1][0] - lm[1][2] > 0 && lm[1][1] - lm[1][3] > 0 p1 = (lm[1][0],lm[1][2]) p2 = (lm[1][1],lm[1][3]) p3 = (lm[1][1]+lm[0],lm[1][3]) a = gettheta(p1,p2,p3) if a > 90 a = 180 - a print(a) print("FPS %f" % clock.fps())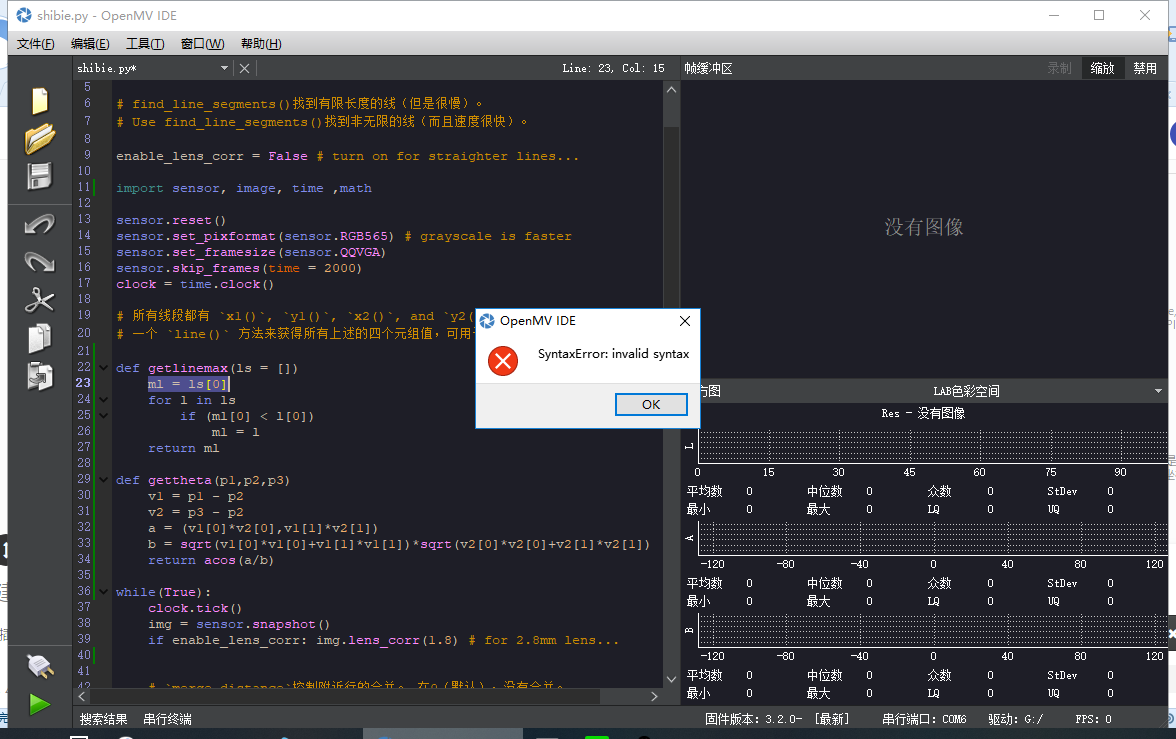
-
少了冒号,少了很多冒号。
: