追小球的小车,car.py中的问题。
-
def run(left_speed, right_speed):
if inverse_left==True: #如果电机不是正转,减速度
left_speed=(-left_speed)
if inverse_right==True:
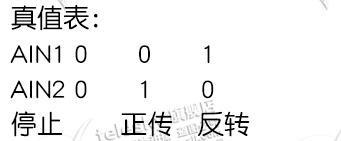
right_speed=(-right_speed)if left_speed < 0: #当速度减到负,让电机反转 ain1.low() ain2.high() else: ain1.high() ain2.low() ch1.pulse_width_percent(abs(left_speed)) if right_speed < 0: bin1.low() bin2.high() else: bin1.high() bin2.low() ch2.pulse_width_percent(abs(right_speed))按照真值表,if left_speed < 0的时候电机反转,为什么是ain1.low() ain2.high();而不是 ain1.high(),ain2.low()
;
-
正反是自己确定的。
正反和电机的摆放有关,和连线有关,和电源的方向有关。