关于缩进
-
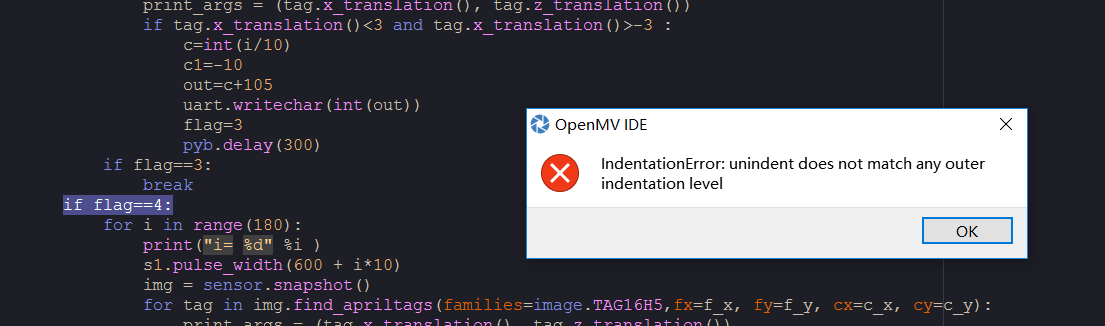
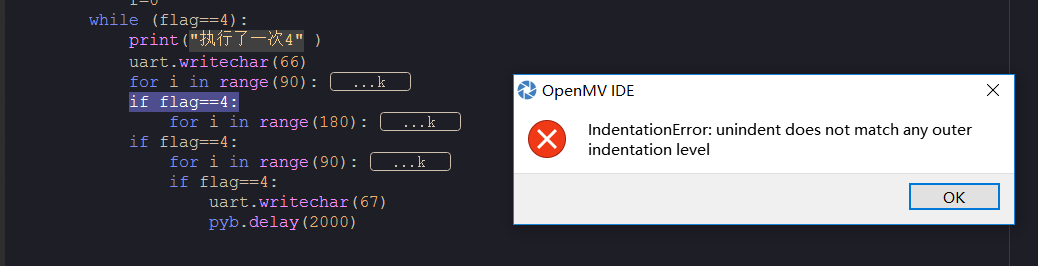
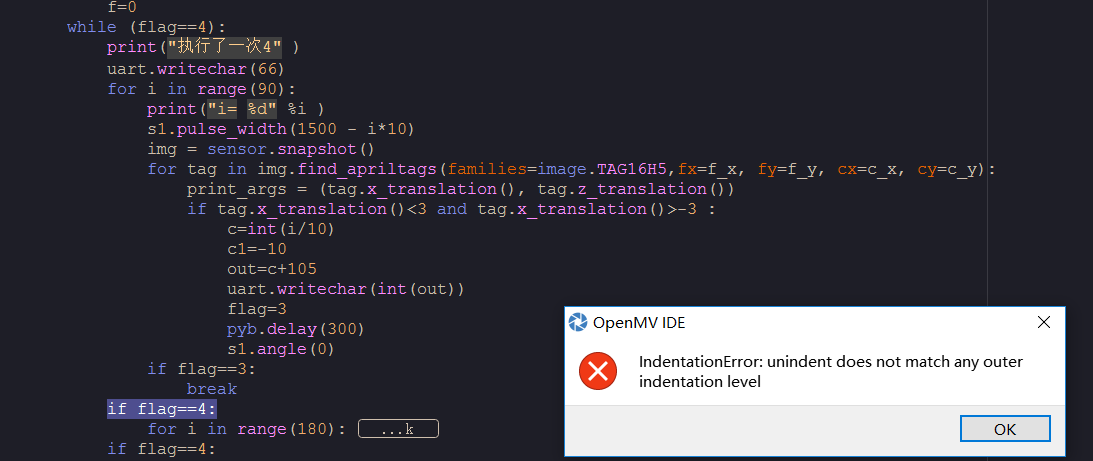
之前编号的程序,一段时间之后加了几句话,就编译不通过了,提示缩进错误,求解决方案
-
缩进错了,按照逻辑调整一下缩进
也只能这样呀
-
@kidswong999
真的有问题么?查了很多次了
-
-
你把,代码用格式复制一下
-
import sensor, image, time, math,pyb from pyb import Servo from pyb import UART from pid import PID from pyb import millis from pyb import Pin, Timer sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) sensor.set_auto_whitebal(False) f_x = (12 / 3.984) * 160 f_y = (12 / 2.952) * 120 c_x = 160 * 0.5 c_y = 120 * 0.5 s1 = Servo(1) s1.angle(0) x_pid = PID(p=3, i=0.05, imax=50) x1_pid = PID(p=3, i=0.02, imax=50) uart = UART(1, 115200) uart.init(115200, bits=8, parity=None, stop=1) flag=3 flag1=1 flag2=0 c1=-38 f=0 f0=0 def tick(timer): from pyb import Servo global flag global s1 print("Timer callback") s1.angle(0) flag=3 tim = Timer(5, freq=0.1) tim.callback(tick) def tick1(timer): global flag global f global f0 global z0 print("Timer1 callback") if flag==3 and f==0: if f0==0: flag=4 uart.writechar(66) else: if z0>-20: uart.writechar(83) else: uart.writechar(67) flag=4 tim1 = Timer(3, freq=0.3) tim1.callback(tick1) while(True): while(flag!=2): res=uart.readchar() if res>=85 and res<=125: res=res-105 out=x1_pid.get_pid(res,1)+105; if out>125: out=125 if out<85: out=85 uart.writechar(int(out)) if res==67: flag=3 if res==66: flag=4 while(flag==3): img = sensor.snapshot() for tag in img.find_apriltags(families=image.TAG16H5,fx=f_x, fy=f_y, cx=c_x, cy=c_y): f=1 if flag1==0 : uart.writechar(65) flag1=1 else: img.draw_rectangle(tag.rect(), color = (255, 0, 0)) print_args = (tag.x_translation(), tag.z_translation()) print("Tx: %f, ,Tz %f" % print_args) x_output=x_pid.get_pid(tag.x_translation(),1) x_output=x_output*1.2+105 if tag.z_translation()<-15: uart.writechar(int(x_output)) print("out!! %f" % x_output) z0=tag.z_translation() else: uart.writechar(83) flag=2 flag3=0 print("浇水2" ) f0=f f=0 while (flag==4): print("执行了一次4" ) uart.writechar(66) for i in range(90): print("i= %d" %i ) s1.pulse_width(1500 - i*10) img = sensor.snapshot() for tag in img.find_apriltags(families=image.TAG16H5,fx=f_x, fy=f_y, cx=c_x, cy=c_y): print_args = (tag.x_translation(), tag.z_translation()) if tag.x_translation()<3 and tag.x_translation()>-3 : c=int(i/10) c1=-10 out=c+105 uart.writechar(int(out)) flag=3 pyb.delay(300) s1.angle(0) if flag==3: break if flag==4: for i in range(180): print("i= %d" %i ) s1.pulse_width(600 + i*10) img = sensor.snapshot() for tag in img.find_apriltags(families=image.TAG16H5,fx=f_x, fy=f_y, cx=c_x, cy=c_y): print_args = (tag.x_translation(), tag.z_translation()) if tag.x_translation()<3 and tag.x_translation()>-3 : c=int(-(i-90)/10) if c>0: c1=10 else: c1=-10 out=c+105 uart.writechar(out) flag=3 pyb.delay(300) s1.angle(0) if flag==3: break if flag==4: for i in range(90): print("i= %d" %i ) s1.pulse_width(2400 - i*10) img = sensor.snapshot() for tag in img.find_apriltags(families=image.TAG16H5,fx=f_x, fy=f_y, cx=c_x, cy=c_y): print_args = (tag.x_translation(), tag.z_translation()) if tag.x_translation()<3 and tag.x_translation()>-3 : c=int(-(90-i)/10) out=c+105 uart.writechar(out) flag=3 c1=10 pyb.delay(300) s1.angle(0) if flag==3: break if flag==4: uart.writechar(67) pyb.delay(2000)
-
为什么在IDE里编辑的格式和粘贴在这里的不同呢
-
我帮你把缩进对齐了,并且OpenMV u盘中保存了pid.py文件,运行后没有问题了。
就是两个问题,你自己检查校对一下。
1.要把pid.py放进openmv的u盘。
2.缩进要对齐。(主要是你代码里if flag==4: 这里)import sensor, image, time, math,pyb from pyb import Servo from pyb import UART from pid import PID from pyb import millis from pyb import Pin, Timer sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) sensor.set_auto_whitebal(False) f_x = (12 / 3.984) * 160 f_y = (12 / 2.952) * 120 c_x = 160 * 0.5 c_y = 120 * 0.5 s1 = Servo(1) s1.angle(0) x_pid = PID(p=3, i=0.05, imax=50) x1_pid = PID(p=3, i=0.02, imax=50) uart = UART(1, 115200) uart.init(115200, bits=8, parity=None, stop=1) flag=3 flag1=1 flag2=0 c1=-38 f=0 f0=0 def tick(timer): from pyb import Servo global flag global s1 print("Timer callback") s1.angle(0) flag=3 tim = Timer(5, freq=0.1) tim.callback(tick) def tick1(timer): global flag global f global f0 global z0 print("Timer1 callback") if flag==3 and f==0: if f0==0: flag=4 uart.writechar(66) else: if z0>-20: uart.writechar(83) else: uart.writechar(67) flag=4 tim1 = Timer(3, freq=0.3) tim1.callback(tick1) while(True): while(flag!=2): res=uart.readchar() if res>=85 and res<=125: res=res-105 out=x1_pid.get_pid(res,1)+105; if out>125: out=125 if out<85: out=85 uart.writechar(int(out)) if res==67: flag=3 if res==66: flag=4 while(flag==3): img = sensor.snapshot() for tag in img.find_apriltags(families=image.TAG16H5,fx=f_x, fy=f_y, cx=c_x, cy=c_y): f=1 if flag1==0 : uart.writechar(65) flag1=1 else: img.draw_rectangle(tag.rect(), color = (255, 0, 0)) print_args = (tag.x_translation(), tag.z_translation()) print("Tx: %f, ,Tz %f" % print_args) x_output=x_pid.get_pid(tag.x_translation(),1) x_output=x_output*1.2+105 if tag.z_translation()<-15: uart.writechar(int(x_output)) print("out!! %f" % x_output) z0=tag.z_translation() else: uart.writechar(83) flag=2 flag3=0 print("浇水2" ) f0=f f=0 while (flag==4): print("执行了一次4" ) uart.writechar(66) for i in range(90): print("i= %d" %i ) s1.pulse_width(1500 - i*10) img = sensor.snapshot() for tag in img.find_apriltags(families=image.TAG16H5,fx=f_x, fy=f_y, cx=c_x, cy=c_y): print_args = (tag.x_translation(), tag.z_translation()) if tag.x_translation()<3 and tag.x_translation()>-3 : c=int(i/10) c1=-10 out=c+105 uart.writechar(int(out)) flag=3 pyb.delay(300) s1.angle(0) if flag==3: break if flag==4: for i in range(180): print("i= %d" %i ) s1.pulse_width(600 + i*10) img = sensor.snapshot() for tag in img.find_apriltags(families=image.TAG16H5,fx=f_x, fy=f_y, cx=c_x, cy=c_y): print_args = (tag.x_translation(), tag.z_translation()) if tag.x_translation()<3 and tag.x_translation()>-3 : c=int(-(i-90)/10) if c>0: c1=10 else: c1=-10 out=c+105 uart.writechar(out) flag=3 pyb.delay(300) s1.angle(0) if flag==3: break if flag==4: for i in range(90): print("i= %d" %i ) s1.pulse_width(2400 - i*10) img = sensor.snapshot() for tag in img.find_apriltags(families=image.TAG16H5,fx=f_x, fy=f_y, cx=c_x, cy=c_y): print_args = (tag.x_translation(), tag.z_translation()) if tag.x_translation()<3 and tag.x_translation()>-3 : c=int(-(90-i)/10) out=c+105 uart.writechar(out) flag=3 c1=10 pyb.delay(300) s1.angle(0) if flag==3: break if flag==4: uart.writechar(67) pyb.delay(2000)