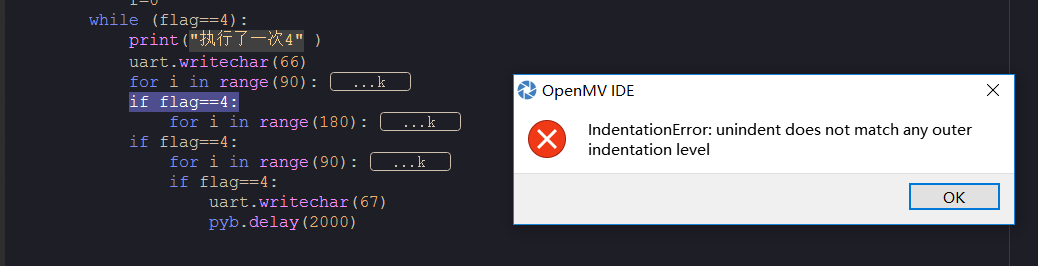
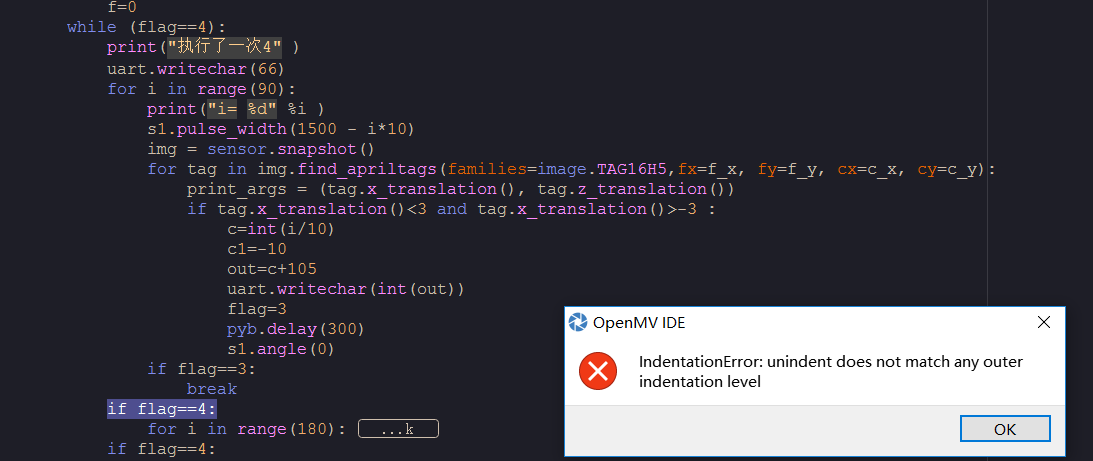
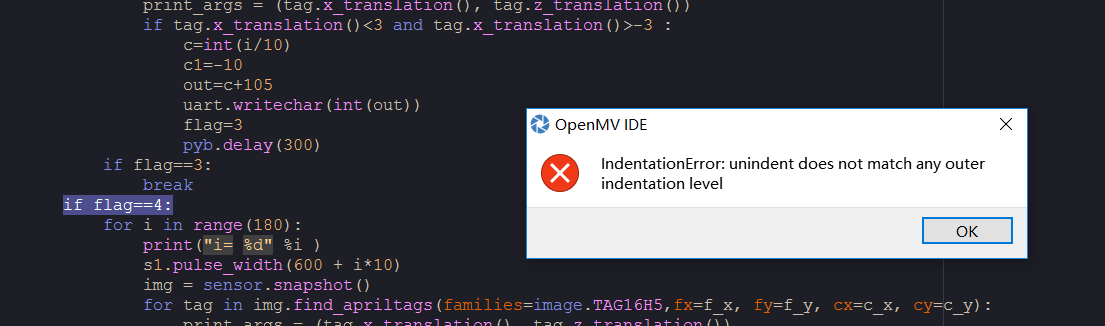
为什么在IDE里编辑的格式和粘贴在这里的不同呢
1
13021127255
@13021127255
0
声望
5
楼层
540
资料浏览
0
粉丝
0
关注
13021127255 发布的帖子
-
RE: 关于缩进发布在 OpenMV Cam
import sensor, image, time, math,pyb from pyb import Servo from pyb import UART from pid import PID from pyb import millis from pyb import Pin, Timer sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) sensor.set_auto_whitebal(False) f_x = (12 / 3.984) * 160 f_y = (12 / 2.952) * 120 c_x = 160 * 0.5 c_y = 120 * 0.5 s1 = Servo(1) s1.angle(0) x_pid = PID(p=3, i=0.05, imax=50) x1_pid = PID(p=3, i=0.02, imax=50) uart = UART(1, 115200) uart.init(115200, bits=8, parity=None, stop=1) flag=3 flag1=1 flag2=0 c1=-38 f=0 f0=0 def tick(timer): from pyb import Servo global flag global s1 print("Timer callback") s1.angle(0) flag=3 tim = Timer(5, freq=0.1) tim.callback(tick) def tick1(timer): global flag global f global f0 global z0 print("Timer1 callback") if flag==3 and f==0: if f0==0: flag=4 uart.writechar(66) else: if z0>-20: uart.writechar(83) else: uart.writechar(67) flag=4 tim1 = Timer(3, freq=0.3) tim1.callback(tick1) while(True): while(flag!=2): res=uart.readchar() if res>=85 and res<=125: res=res-105 out=x1_pid.get_pid(res,1)+105; if out>125: out=125 if out<85: out=85 uart.writechar(int(out)) if res==67: flag=3 if res==66: flag=4 while(flag==3): img = sensor.snapshot() for tag in img.find_apriltags(families=image.TAG16H5,fx=f_x, fy=f_y, cx=c_x, cy=c_y): f=1 if flag1==0 : uart.writechar(65) flag1=1 else: img.draw_rectangle(tag.rect(), color = (255, 0, 0)) print_args = (tag.x_translation(), tag.z_translation()) print("Tx: %f, ,Tz %f" % print_args) x_output=x_pid.get_pid(tag.x_translation(),1) x_output=x_output*1.2+105 if tag.z_translation()<-15: uart.writechar(int(x_output)) print("out!! %f" % x_output) z0=tag.z_translation() else: uart.writechar(83) flag=2 flag3=0 print("浇水2" ) f0=f f=0 while (flag==4): print("执行了一次4" ) uart.writechar(66) for i in range(90): print("i= %d" %i ) s1.pulse_width(1500 - i*10) img = sensor.snapshot() for tag in img.find_apriltags(families=image.TAG16H5,fx=f_x, fy=f_y, cx=c_x, cy=c_y): print_args = (tag.x_translation(), tag.z_translation()) if tag.x_translation()<3 and tag.x_translation()>-3 : c=int(i/10) c1=-10 out=c+105 uart.writechar(int(out)) flag=3 pyb.delay(300) s1.angle(0) if flag==3: break if flag==4: for i in range(180): print("i= %d" %i ) s1.pulse_width(600 + i*10) img = sensor.snapshot() for tag in img.find_apriltags(families=image.TAG16H5,fx=f_x, fy=f_y, cx=c_x, cy=c_y): print_args = (tag.x_translation(), tag.z_translation()) if tag.x_translation()<3 and tag.x_translation()>-3 : c=int(-(i-90)/10) if c>0: c1=10 else: c1=-10 out=c+105 uart.writechar(out) flag=3 pyb.delay(300) s1.angle(0) if flag==3: break if flag==4: for i in range(90): print("i= %d" %i ) s1.pulse_width(2400 - i*10) img = sensor.snapshot() for tag in img.find_apriltags(families=image.TAG16H5,fx=f_x, fy=f_y, cx=c_x, cy=c_y): print_args = (tag.x_translation(), tag.z_translation()) if tag.x_translation()<3 and tag.x_translation()>-3 : c=int(-(90-i)/10) out=c+105 uart.writechar(out) flag=3 c1=10 pyb.delay(300) s1.angle(0) if flag==3: break if flag==4: uart.writechar(67) pyb.delay(2000)