openmv和stm32串口通讯未成功,想请教一下原因?
-
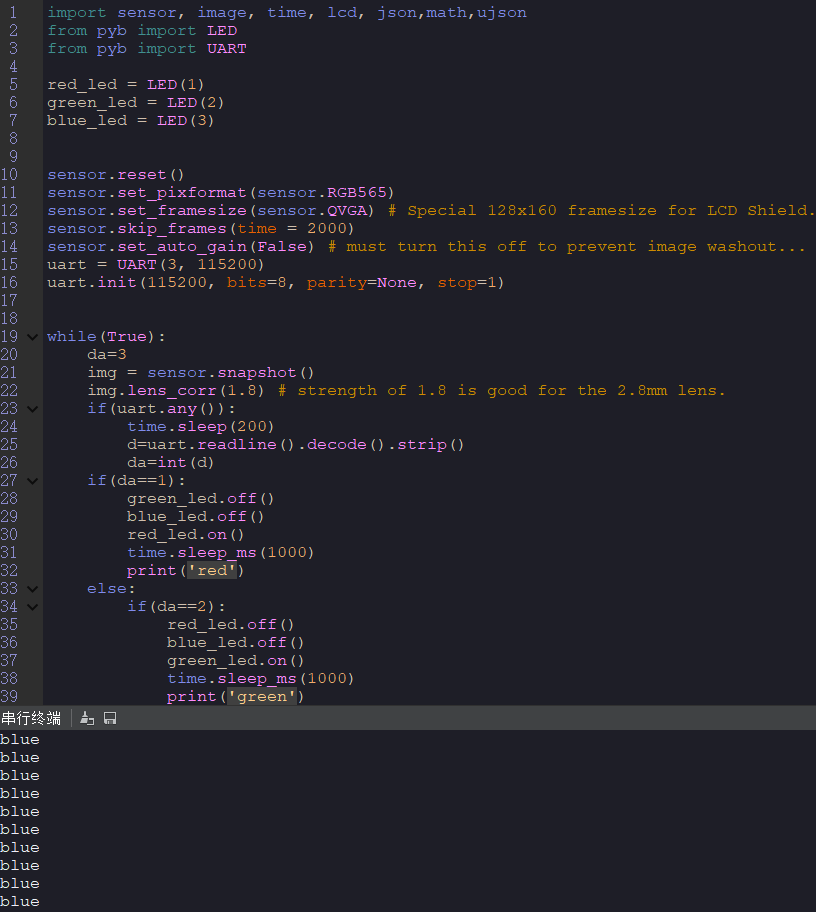
这是我写的openmv的代码,不涉及openmv向stm32发送信息,已经成功烧到了openmv4里面,是可以亮蓝灯的,我感觉我写的应该没大有问题,但是无法和stm32进行通讯,感觉接收不到stm32的信息,stm32usart1这个串口有跳线帽的时候,串口调试助手上是可以看到返回了字节符的,想请问一下是什么原因呀?
import sensor, image, time, lcd, json,math,ujson from pyb import LED from pyb import UART red_led = LED(1) green_led = LED(2) blue_led = LED(3) sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) # Special 128x160 framesize for LCD Shield. sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must turn this off to prevent image washout... uart = UART(3, 115200) uart.init(115200, bits=8, parity=None, stop=1) while(True): da=3 img = sensor.snapshot() img.lens_corr(1.8) # strength of 1.8 is good for the 2.8mm lens. if(uart.any()): time.sleep(200) d=uart.readline().decode().strip() da=int(d) if(da==1): green_led.off() blue_led.off() red_led.on() time.sleep_ms(1000) print('red') else: if(da==2): red_led.off() blue_led.off() green_led.on() time.sleep_ms(1000) print('green') else: if(da==3): red_led.off() green_led.off() blue_led.on() time.sleep_ms(1000) print('blue')
-
此回复已被删除!
-
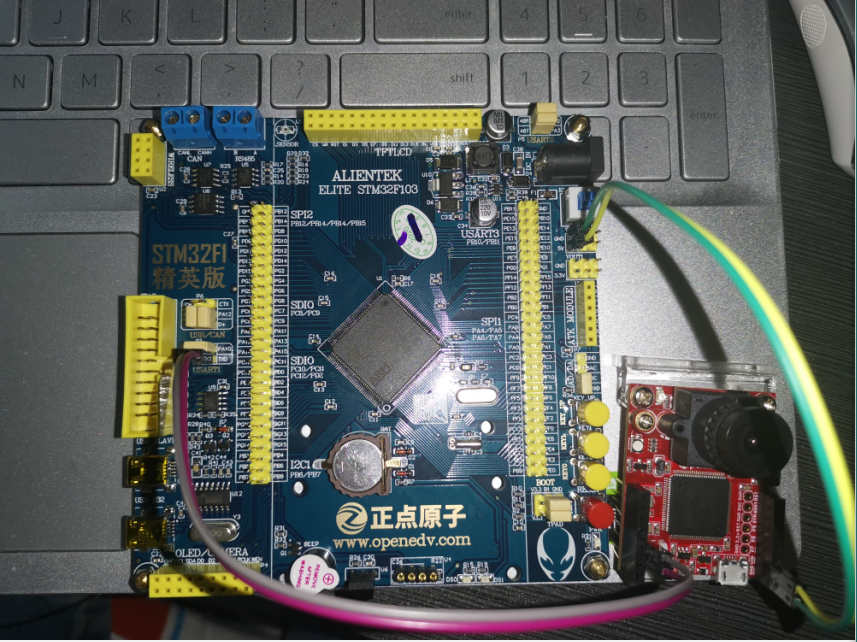
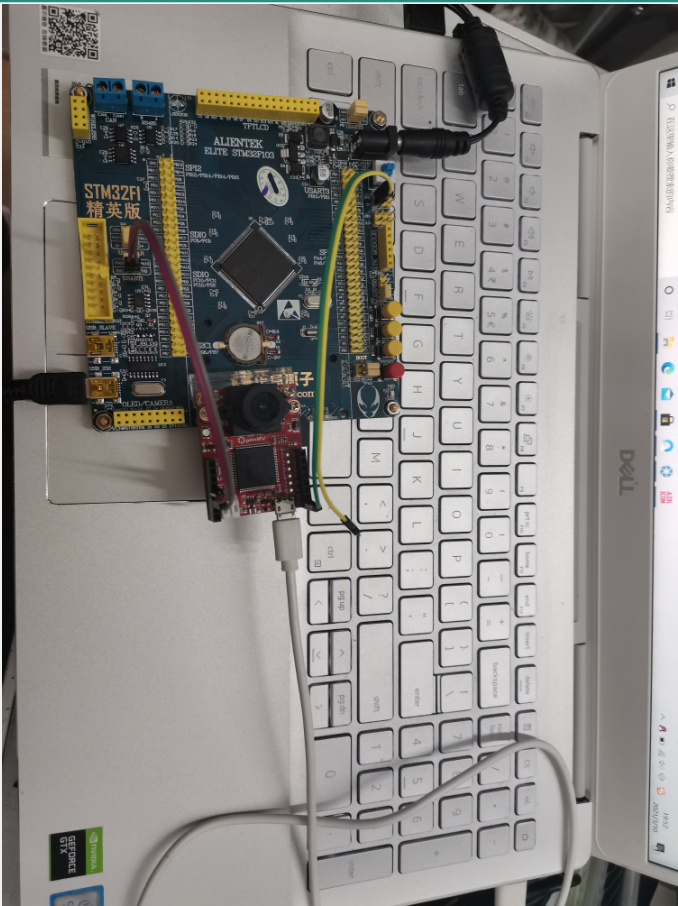
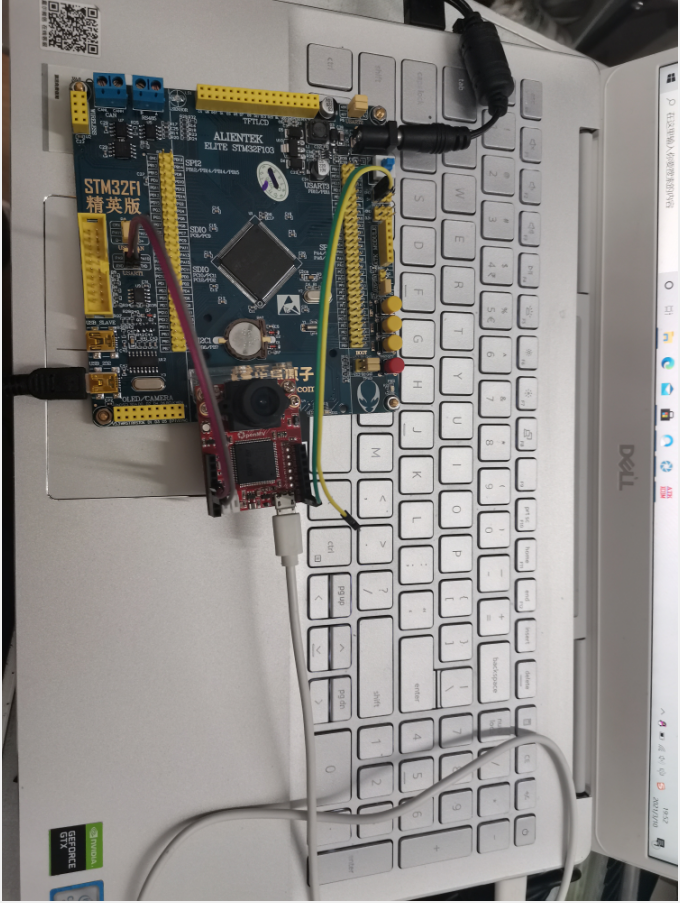
连线是这个样子的,麻烦大家了,拜托了
-
在OpenMV端,只写读取的代码,然后print看一看有没有数据。
-
@kidswong999
您好,我没有改变源代码,采用了这样的接线方式,在IDE上进行观察,发现在未在串口调试助手(xcom)发送1时,可以在串行终端看到blue的输出,但是一旦我发送了1,blue就不再输出
-
 ,谢谢小助手!!!
,谢谢小助手!!!