求解
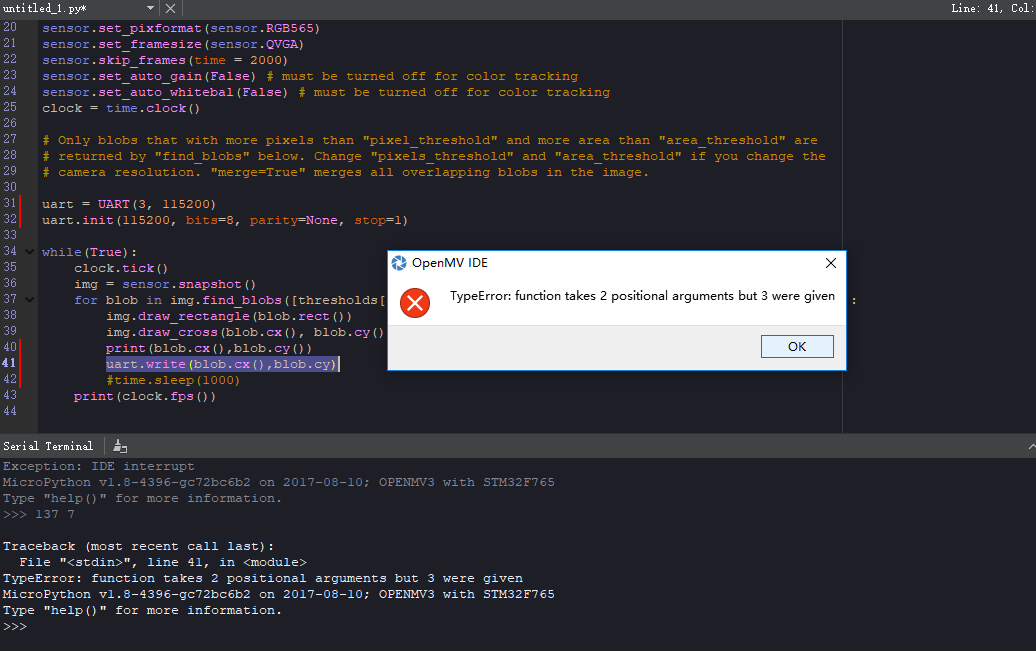
为什么会显示这个问题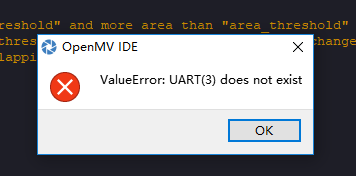
import sensor, image, time,json
from pyb import UART
threshold_index = 0 # 0 for red, 1 for green, 2 for blue
thresholds = [(0, 98, 92, 17, -128, 127)] # generic_red_thresholds
#(30, 100, -64, -8, -32, 32), # generic_green_thresholds
# (0, 30, 0, 64, -128, 0)] # generic_blue_thresholds
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # must be turned off for color tracking
clock = time.clock()
uart = UART(3, 19200)
uart.init(19200, bits=8, parity=None, stop=1)
while(True):
clock.tick()
img = sensor.snapshot()
for blob in img.find_blobs([thresholds[0]], pixels_threshold=200, area_threshold=200, merge=True):
img.draw_rectangle(blob.rect())
img.draw_cross(blob.cx(), blob.cy())
print(blob.cx(),blob.cy())
uart.write(blob.cx(),blob.cy())
time.sleep(1000)
print(clock.fps())
这是代码