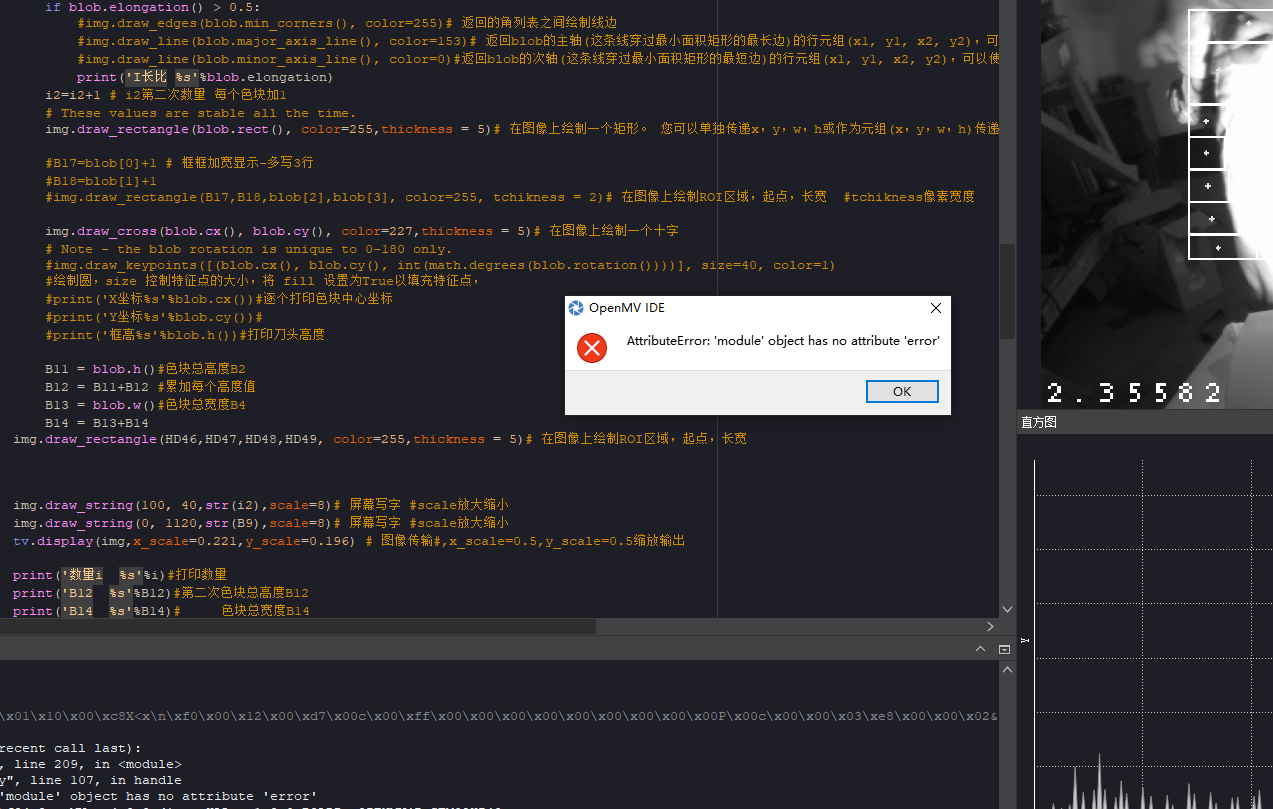
运行几分钟就会报这个错误(module object has no attribute error)
import sensor, image, time, math, tv ##- 周一 5月 1 2023
from pyb import UART # 导入串口
from modbus import ModbusRTU # 导入ModbusRTU的类
uart = UART(3,9600, parity=None, stop=1, timeout=2, timeout_char=1) # 串口3,波特率,效验,停止位
modbus = ModbusRTU(uart, register_num=9999) # 实例一个Modbus对象
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.set_framesize(sensor.UXGA)# WQXGA 2592*1944 #300万QXGA2048*1536 #190万UXGA1600*1200 #70万XGA1024*768 #SVGA800*600 #VGA640*480 #QVGA 320*240 #QQVGA 160*120
# sensor.set_hmirror(True) #图像水平反转
sensor.set_vflip(True) #图像垂直反转
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # must be turned off for color tracking
tv.init(triple_buffer=True) # Initialize the tv.TV初始化
clock = time.clock()
"""
"""
Y1 =Y2 = 0 # 第一次阈值
Y3 =Y4 = 0 # 第2次阈值
Y5 =Y6 =Y7 =Y8 = 0 # 第3次4次阈值
HD0=HD1=HD2=HD3=HD4=HD5=HD6=HD7=HD8=HD9=HD10=HD11=HD12=HD13=HD14=HD15=HD16=HD17=HD18=HD19=HD20=0
HD21=HD22=HD23=HD24=HD25=HD26=HD27=HD28=HD29=HD30=HD31=HD32=HD33=HD34=HD35=HD36=HD37=HD38=HD39=HD40=0
HD45=HD46=HD47=HD50=HD51=HD52=HD53=HD54=HD55=HD56=HD57=HD58=HD59=HD60=0
HD41=HD42=0
HD43=HD44=HD48=HD49=300 #第一次、第二次roi大小
HD200=HD201=HD223=HD224=HD225=HD226=HD227=HD228=HD229=0 # 第二次总高总宽计算
B5=0
B1=B2=B3=B4=B6=B7=B8=B9=B10=B11=B12=B13=B14=B15=B16=B17=B18=B19=B20=B21=B22=B23=B24=B25=B26=B27=B28=B29=B30=B31=B32=B33=B34 =0
while(True): # 一个死循环
clock.tick()
#sensor.set_windowing(0,0,479,362)
i=i2=0 # 定义变量i,大色块个数
#image.draw_string(30, 10,Y2)# 屏幕写字
#print('HD41 %s'%HD41)
if HD50 == 1: #第一开关 PLC-D249
B1=B2=B3=B4=B5=B6=B7=B8=0
thresholds = (Y1, Y2)#第一次查找阈值
#image.draw_string(0, 10, Y1)
img = sensor.snapshot()
for blob in img.find_blobs([thresholds],roi = [HD41,HD42,HD43,HD44], pixels_threshold=10, area_threshold=10, merge=True):#pixels像素个数阈值,area返回色块边框面积阈值(w * h),merge=True多种颜色时显示一个框框
#print('HD41 %s'%HD41)#, merge=True
if blob.elongation() > 0.8:
#img.draw_edges(blob.min_corners(), color=255)# 返回的角列表之间绘制线边
#img.draw_line(blob.major_axis_line(), color=153)# 返回blob的主轴(这条线穿过最小面积矩形的最长边)的行元组(x1, y1, x2, y2),可以使用 image.draw_line() 来绘制它。
#img.draw_line(blob.minor_axis_line(), color=0)#返回blob的次轴(这条线穿过最小面积矩形的最短边)的行元组(x1, y1, x2, y2),可以使用 image.draw_line() 来绘制它。
print('I长比 %s'%blob.elongation)
i=i+1 # 每个色块加1
# These values are stable all the time.
img.draw_rectangle(blob.rect(), color=255, thickness = 5)# 在图像上绘制一个矩形。 您可以单独传递x,y,w,h或作为元组(x,y,w,h)传递。
#B7=blob[0]+1 # 框框加宽显示-多写3行
#B8=blob[1]+1
#img.draw_rectangle(B7,B8,blob[2],blob[3], color=255, thickness = 50)# 在图像上绘制ROI区域,起点,长宽 #tchikness像素宽度
img.draw_cross(blob.cx(), blob.cy(), color=227,thickness = 5)# 在图像上绘制一个十字 #tchikness像素宽度
# Note - the blob rotation is unique to 0-180 only.
#img.draw_keypoints([(blob.cx(), blob.cy(), int(math.degrees(blob.rotation())))], size=40, color=1)
#绘制圆,size 控制特征点的大小,将 fill 设置为True以填充特征点,
#print('X坐标%s'%blob.cx())#逐个打印色块中心坐标
#print('Y坐标%s'%blob.cy())#
#print('框高%s'%blob.h())#打印刀头高度
B1 = blob.h()#色块总高度B2
B2 = B1+B2
B3 = blob.w()#色块总宽度B4
B4 = B3+B4
img.draw_rectangle(HD41,HD42,HD43,HD44, color=255, thickness = 5)# 在图像上绘制ROI区域,起点,长宽 #thickness像素宽度
img.draw_line(20,50, 21, 51, thickness = 3)# 画白线,2像素宽度
img.draw_string(0, 40,str(i),scale=8)# 屏幕写字 #scale放大缩小
img.draw_string(0, 1120,str(B9),scale=8)# 屏幕写字 #scale放大缩小
tv.display(img,x_scale=0.221,y_scale=0.196) # 图像传输#,x_scale=0.5,y_scale=0.5缩放输出
# VGA640*480(缩放0.55,0.49) #XGA1024*768(缩放0.35,0.31) #UXGA1600*1200(缩放0.221,0.196)
#time.sleep_ms(100) # 延时
print('数量i %s'%i)#打印数量
print('B2 %s'%B2)#色块总高度B2
print('B4 %s'%B4)#色块总宽度B4
HD0 = B2 #第一次总高总宽暂存
HD1 = B4
if HD7 == 1: #标定开关
HD8 = B2 #第一次总高度另存为
HD9 = B4 #第一次总宽度另存为
if B2 == HD44: #检测区域 全黑全白 无特征输出0
B2 = 0 #第
if B4 == HD43: #检测区域 全黑全白 无特征输出0
B4 = 0
HD3 = HD10/100 #PLC设定HD10
HD4 = HD8*HD3 #总高度B2对比数值
print('HD4 %s'%HD4)
if HD0 > HD4: #判断第一次阈值总高度是否报警
HD5 = 1
else:
HD5 = 0
HD6 = HD9*HD3 #总宽度B4对比数值
print('HD6 %s'%HD6)
if HD1 > HD6: #判断第一次阈值总宽度是否报警
HD5 = 1
else:
HD5 = 0
if HD45 == 2: # 第二开关 PLC-D244 开始第二次...................................................................................
if B10 == 0:
B10 = 1
if B10 == 2:
B10 = 0
if B10 == 1: # 轮换显示
B11=B12=B13=B14=B15=B16=B17=B18=0
thresholds = (Y3, Y4)#第二次查找阈值
img = sensor.snapshot()
for blob in img.find_blobs([thresholds],roi = [HD46,HD47,HD48,HD49], pixels_threshold=50, area_threshold=255,merge=True):#pixels像素个数阈值,area返回色块边框面积阈值(w * h),merge=True多种颜色时显示一个框框
#print('HD41 %s'%HD41) ,merge=True #第二次roi
if blob.elongation() > 0.5:
#img.draw_edges(blob.min_corners(), color=255)# 返回的角列表之间绘制线边
#img.draw_line(blob.major_axis_line(), color=153)# 返回blob的主轴(这条线穿过最小面积矩形的最长边)的行元组(x1, y1, x2, y2),可以使用 image.draw_line() 来绘制它。
#img.draw_line(blob.minor_axis_line(), color=0)#返回blob的次轴(这条线穿过最小面积矩形的最短边)的行元组(x1, y1, x2, y2),可以使用 image.draw_line() 来绘制它。
print('I长比 %s'%blob.elongation)
i2=i2+1 # i2第二次数量 每个色块加1
# These values are stable all the time.
img.draw_rectangle(blob.rect(), color=255,thickness = 5)# 在图像上绘制一个矩形。 您可以单独传递x,y,w,h或作为元组(x,y,w,h)传递。
#B17=blob[0]+1 # 框框加宽显示-多写3行
#B18=blob[1]+1
#img.draw_rectangle(B17,B18,blob[2],blob[3], color=255, tchikness = 2)# 在图像上绘制ROI区域,起点,长宽 #tchikness像素宽度
img.draw_cross(blob.cx(), blob.cy(), color=227,thickness = 5)# 在图像上绘制一个十字
# Note - the blob rotation is unique to 0-180 only.
#img.draw_keypoints([(blob.cx(), blob.cy(), int(math.degrees(blob.rotation())))], size=40, color=1)
#绘制圆,size 控制特征点的大小,将 fill 设置为True以填充特征点,
#print('X坐标%s'%blob.cx())#逐个打印色块中心坐标
#print('Y坐标%s'%blob.cy())#
#print('框高%s'%blob.h())#打印刀头高度
B11 = blob.h()#色块总高度B2
B12 = B11+B12 #累加每个高度值
B13 = blob.w()#色块总宽度B4
B14 = B13+B14
img.draw_rectangle(HD46,HD47,HD48,HD49, color=255,thickness = 5)# 在图像上绘制ROI区域,起点,长宽
img.draw_string(100, 40,str(i2),scale=8)# 屏幕写字 #scale放大缩小
img.draw_string(0, 1120,str(B9),scale=8)# 屏幕写字 #scale放大缩小
tv.display(img,x_scale=0.221,y_scale=0.196) # 图像传输#,x_scale=0.5,y_scale=0.5缩放输出
print('数量i %s'%i)#打印数量
print('B12 %s'%B12)#第二次色块总高度B12
print('B14 %s'%B14)# 色块总宽度B14
HD200 = B12 # 总高总宽第二次暂存
HD201 = B14
if HD7 == 2: #2第二次标定开关 PLC-D213
HD228 = B12 #第二次总高度另存为
HD229 = B14 #第二次总宽度另存为
if B12 == HD49: #检测区域 全黑全白 无特征输出0
B12 = 0 #第
if B14 == HD48: #检测区域 全黑全白 无特征输出0
B14 = 0
HD223 = HD11/100 #PLC设定HD11 #第二次相似度的百分比PLC-D210
HD224 = HD228*HD223 #总高度B2对比数值
print('HD224 %s'%HD224)
if HD200 > HD224: #判断第一次阈值总高度是否报警
HD5 = 1
else:
HD5 = 0
HD226 = HD229*HD223 #总宽度B4对比数值
print('HD226 %s'%HD226)
if HD201 > HD226: #判断第一次阈值总宽度是否报警
HD5 = 1
else:
HD5 = 0
B10 = 2 # 轮换显示,牺牲第二次运行频率
B19 = 0
while B19 <= 2:
if modbus.any():# 判断modbus是否来openmv请求了数据
B19 += 1
modbus.handle(debug=True) # handle憨豆函数处理modbus数据,包括写与读
modbus.REGISTER[1] = HD5 #第1次阈值报警PLC-D2 发给plc的指令。。。。
modbus.REGISTER[2] = B2 #第一次实时总高度PLC-D3
modbus.REGISTER[3] = B4 #第一次实时总宽度PLC-D4
if HD7 == 1: #标定开关 PLC-D213,(1)第一次标定
modbus.REGISTER[4] = HD8 #第一标定 总高度PLC-D5
modbus.REGISTER[5] = HD9 #第一标定 总宽度PLC-D6
if HD7 == 2: #标定开关 PLC-D213,(2)第二次标定
modbus.REGISTER[6] = HD228 #第二标定 总高度PLC-D7
modbus.REGISTER[7] = HD229 #第二标定 总宽度PLC-D8
modbus.REGISTER[8] = B12 #第二次实时总高度PLC-D9
modbus.REGISTER[9] = B14 #第二次实时总高度PLC-D10
modbus.REGISTER[10] += 1 #第二次实时总高度PLC-D11
if modbus.REGISTER[10]>=100:
modbus.REGISTER[10] = 1
modbus.REGISTER[11] = 1
Y1 = modbus.REGISTER[201] #第1次阈值PLC-D201 接收plc的指令。。。。
Y2 = modbus.REGISTER[202] #第1次阈值PLC-D202
Y3 = modbus.REGISTER[203] #第2次阈值PLC-D203
Y4 = modbus.REGISTER[204] #第2次阈值PLC-D204
Y5 = modbus.REGISTER[205] #第3次阈值PLC-D205
Y6 = modbus.REGISTER[206]
#Y7 = modbus.REGISTER[207] #第4次阈值PLC-D207
#Y8 = modbus.REGISTER[208]
HD10 = modbus.REGISTER[209] #第一次相似度的百分比PLC-D209
HD11 = modbus.REGISTER[210] #第二次相似度的百分比PLC-D210
#HD12 = modbus.REGISTER[211] #第二次相似度的百分比PLC-D211
#HD13 = modbus.REGISTER[212] #第二次相似度的百分比PLC-D212
HD7 = modbus.REGISTER[213] #一次1,二次2 标定开关PLC-D213
HD45 = modbus.REGISTER[244] # PLC-D244
if HD45 >= 1: #第一次roi开关 PLC-D244
HD41 = modbus.REGISTER[240] #roi X PLC-D240 发送0或者未发送数据roi会报错
HD42 = modbus.REGISTER[241] #roi Y PLC-D241
HD43 = modbus.REGISTER[242] #roi 宽 PLC-D242
HD44 = modbus.REGISTER[243] #roi 高 PLC-D243
#if HD45 == 2: #第二次roi开关 PLC-D244
HD46 = modbus.REGISTER[245] #roi X PLC-D245 发送0或者未发送数据roi会报错
HD47 = modbus.REGISTER[246] #roi Y PLC-D246
HD48 = modbus.REGISTER[247] #roi 宽 PLC-D247
HD49 = modbus.REGISTER[248] #roi 高 PLC-D248
HD50 = modbus.REGISTER[249] # 第一次开关 PLC-D249
print('HDY2 %s'%Y2)
print('HD41 %s'%HD41)
print('HD45 %s'%HD45)
print(modbus.REGISTER[0:17]) #写0:17,会打印0-16
print(modbus.REGISTER[200:217]) #写0:17,会打印0-16
print(modbus.REGISTER[240:250]) #写0:17,会打印0-16
print('Y1 %s'% Y1)
print('Y2 %s'% Y2)
else:
#time.sleep_ms(20) # 延时,发送到plc
#modbus.REGISTER[0] = 1100
#modbus.REGISTER[1] += 1
print(modbus.REGISTER[0:4])
# image processing in there
print('帧率 %s'%clock.fps())# 打印帧率
B9=clock.fps()
#print('B9 %s'%B9)# 打印B9