@kidswong999 重新插拔一下USB接口 ,就正常了
X
xd4v 发布的帖子
-
RE: 直线检测报错,求教!发布在 OpenMV Cam
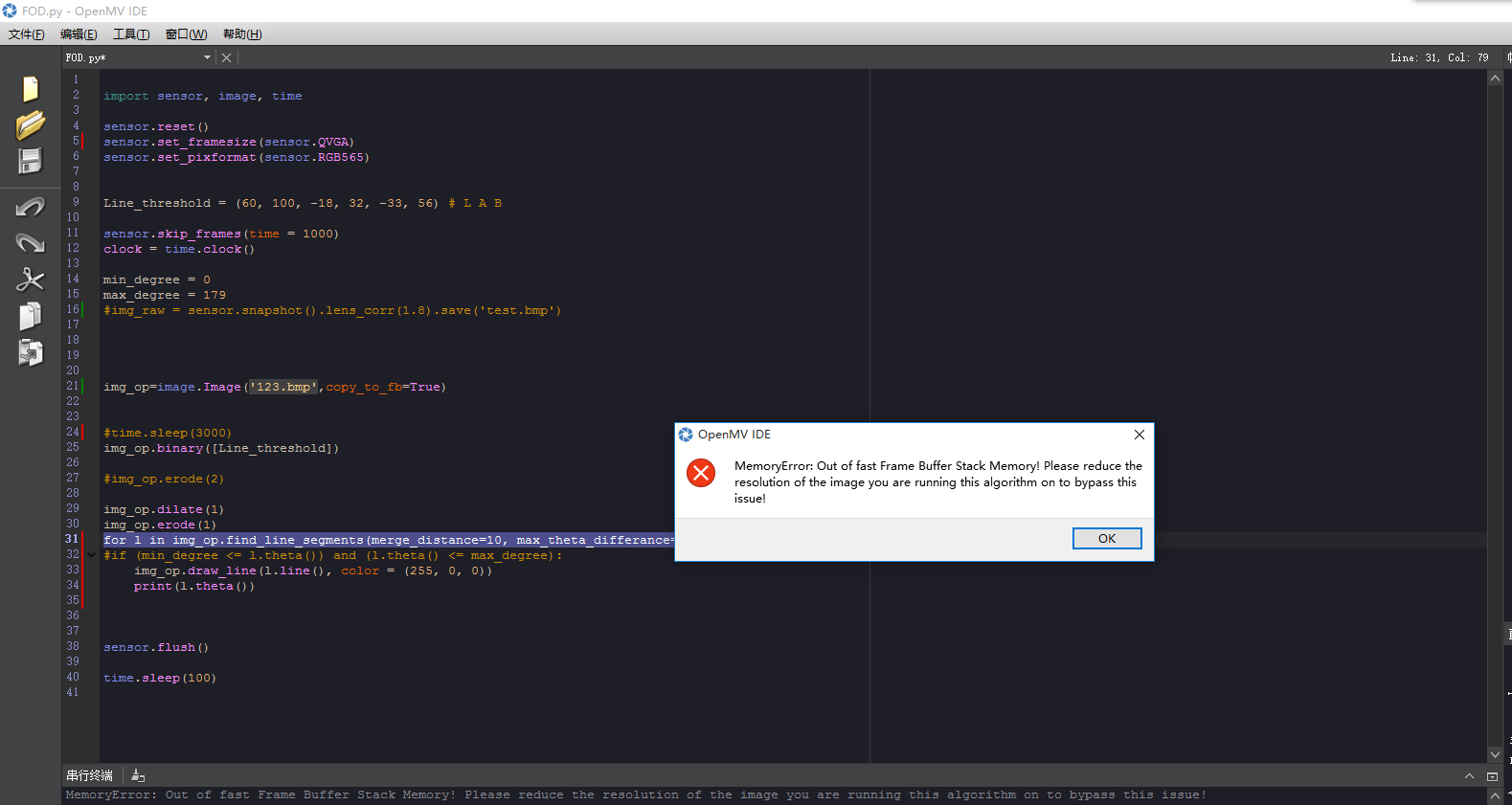
嗯嗯 刚才忘了加冒号。。。改过之后变成这样了,说帧缓存区空间不够?这是怎么回事啊
import sensor, image, time sensor.reset() sensor.set_framesize(sensor.QVGA) sensor.set_pixformat(sensor.RGB565) Line_threshold = (60, 100, -18, 32, -33, 56) # L A B sensor.skip_frames(time = 1000) clock = time.clock() min_degree = 0 max_degree = 179 #img_raw = sensor.snapshot().lens_corr(1.8).save('test.bmp') img_op=image.Image('123.bmp',copy_to_fb=True) #time.sleep(3000) img_op.binary([Line_threshold]) #img_op.erode(2) img_op.dilate(1) img_op.erode(1) for l in img_op.find_line_segments(merge_distance=10, max_theta_differance=2): #if (min_degree <= l.theta()) and (l.theta() <= max_degree): img_op.draw_line(l.line(), color = (255, 0, 0)) print(l.theta()) sensor.flush() time.sleep(100) -
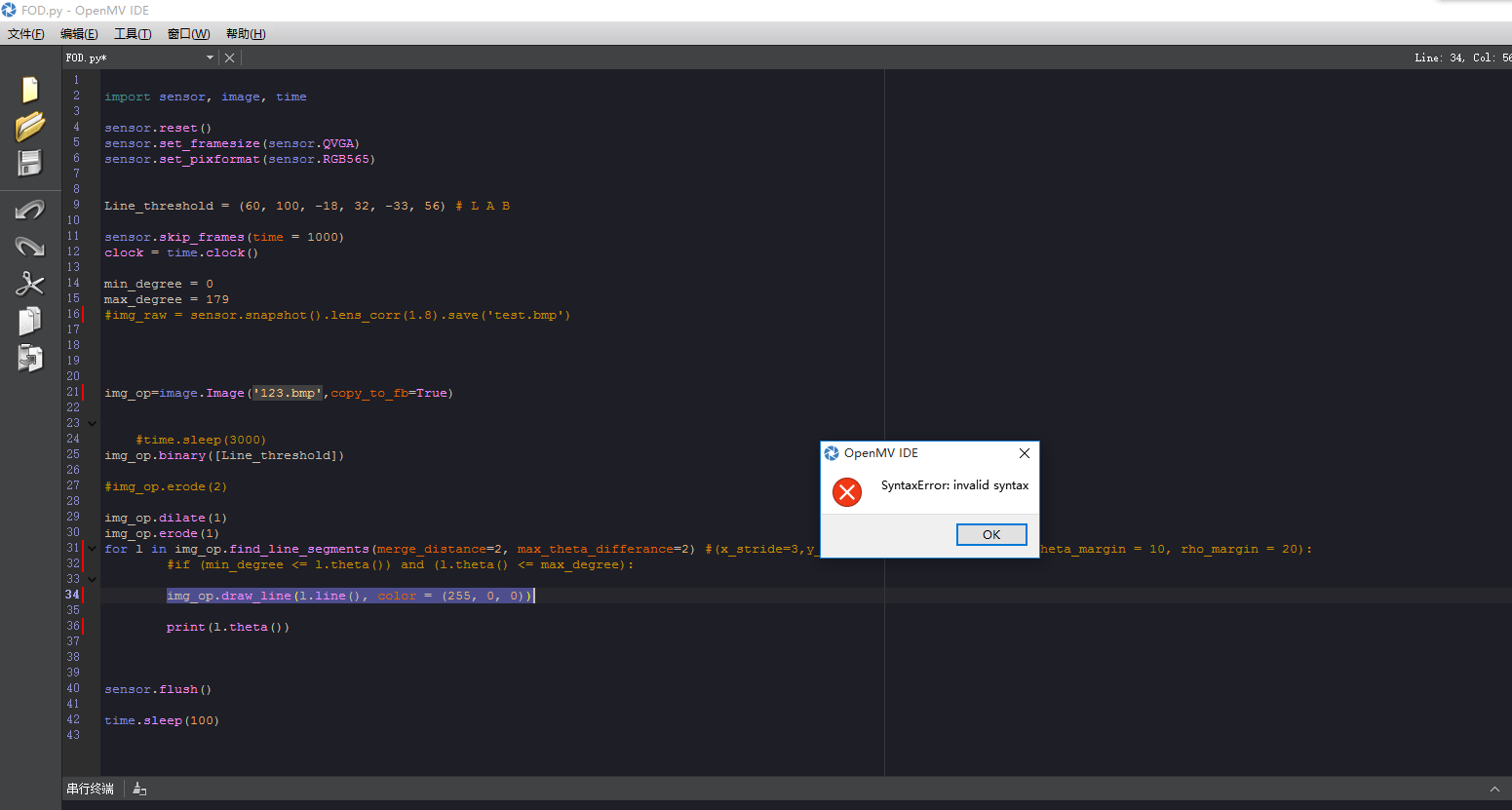
RE: 直线检测报错,求教!发布在 OpenMV Cam
import sensor, image, time sensor.reset() sensor.set_framesize(sensor.QVGA) sensor.set_pixformat(sensor.RGB565) Line_threshold = (60, 100, -18, 32, -33, 56) # L A B sensor.skip_frames(time = 1000) clock = time.clock() min_degree = 0 max_degree = 179 #img_raw = sensor.snapshot().lens_corr(1.8).save('test.bmp') img_op=image.Image('123.bmp',copy_to_fb=True) #time.sleep(3000) img_op.binary([Line_threshold]) #img_op.erode(2) img_op.dilate(1) img_op.erode(1) for l in img_op.find_line_segments(merge_distance=2, max_theta_differance=2) #(x_stride=3,y_stride=3,threshold = 1000, theta_margin = 10, rho_margin = 20): #if (min_degree <= l.theta()) and (l.theta() <= max_degree): img_op.draw_line(l.line(), color = (255, 0, 0)) print(l.theta()) sensor.flush() time.sleep(100) -
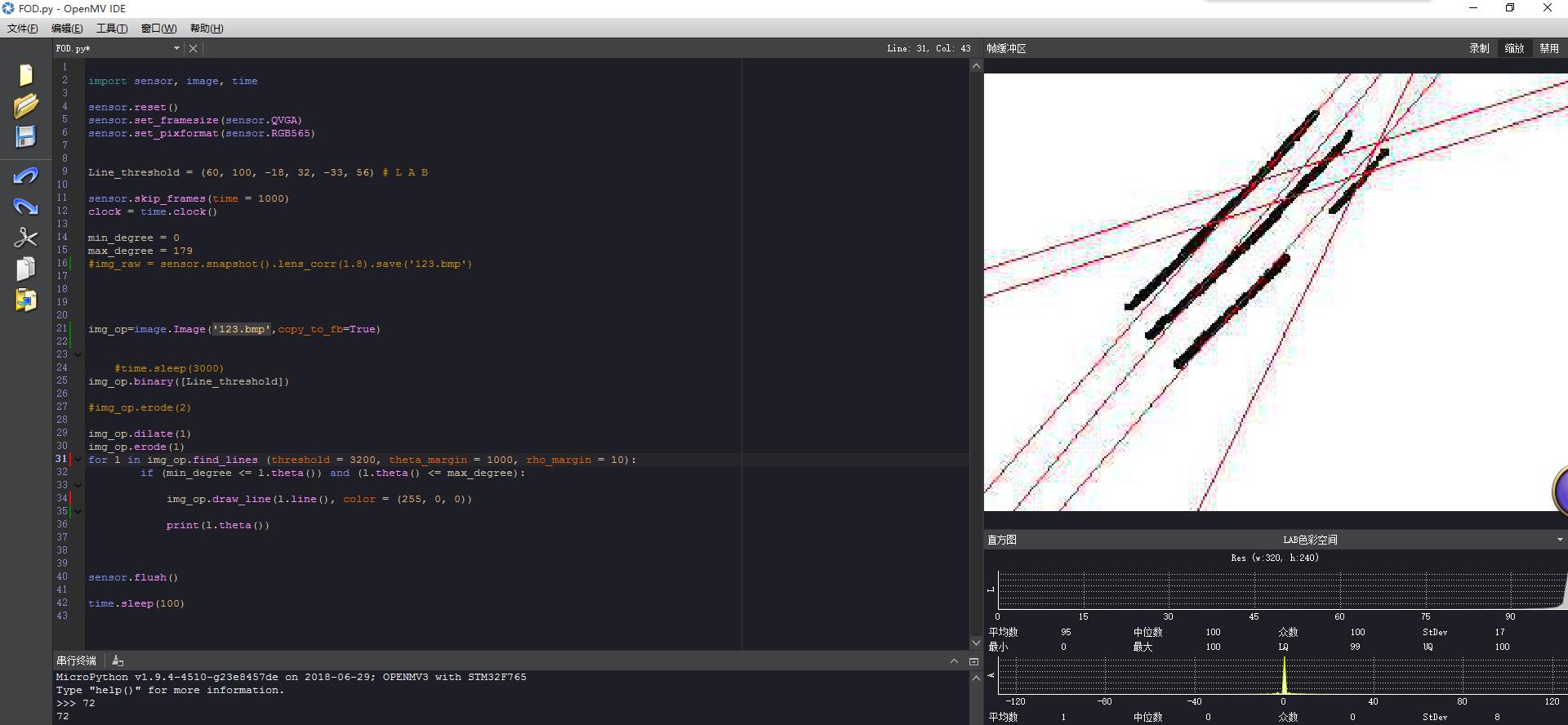
求助:为什么二值化以后仍然有灰色的像素点?发布在 OpenMV Cam
图上,黑色的线周围有一些灰色的像素点,不知道是怎么回事0.0......求教
import sensor, image, time sensor.reset() sensor.set_framesize(sensor.QVGA) sensor.set_pixformat(sensor.RGB565) Line_threshold = (60, 100, -18, 32, -33, 56) # L A B sensor.skip_frames(time = 1000) clock = time.clock() min_degree = 0 max_degree = 179 #img_raw = sensor.snapshot().lens_corr(1.8).save('123.bmp') img_op=image.Image('123.bmp',copy_to_fb=True) #time.sleep(3000) img_op.binary([Line_threshold]) #img_op.erode(2) img_op.dilate(1) img_op.erode(1) for l in img_op.find_lines (threshold = 3300, theta_margin = 1000, rho_margin = 10): if (min_degree <= l.theta()) and (l.theta() <= max_degree): # img_op.draw_line(l.line(), color = (255, 0, 0)) print(l.theta()) sensor.flush() time.sleep(100)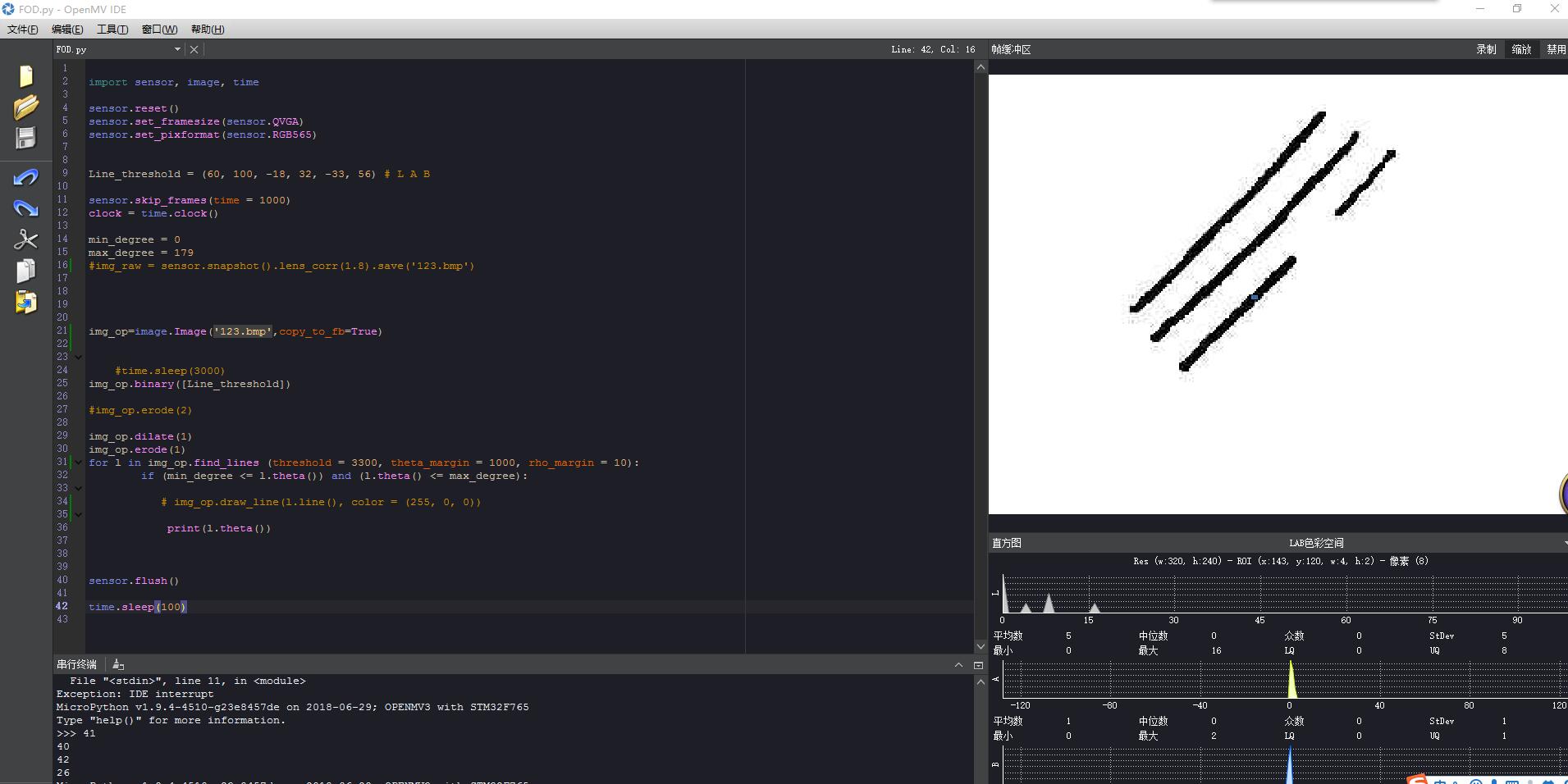
-
无法把图片读入framebuffer,求教发布在 OpenMV Cam
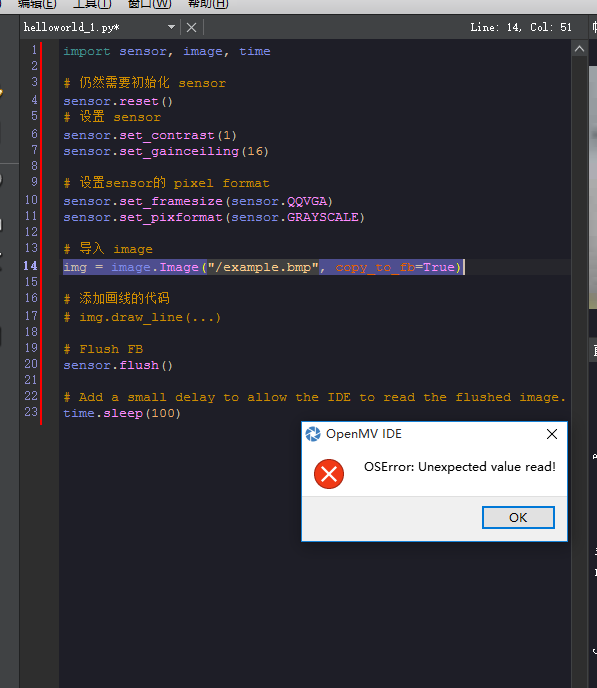
import sensor, image, time # 仍然需要初始化 sensor sensor.reset() # 设置 sensor sensor.set_contrast(1) sensor.set_gainceiling(16) # 设置sensor的 pixel format sensor.set_framesize(sensor.QQVGA) sensor.set_pixformat(sensor.GRAYSCALE) # 导入 image img = image.Image("/example.bmp", copy_to_fb=True) # 添加画线的代码 # img.draw_line(...) # Flush FB sensor.flush() # Add a small delay to allow the IDE to read the flushed image. time.sleep(100) -
RE: 请问怎么在帧缓冲区显示想要看的图像发布在 OpenMV Cam
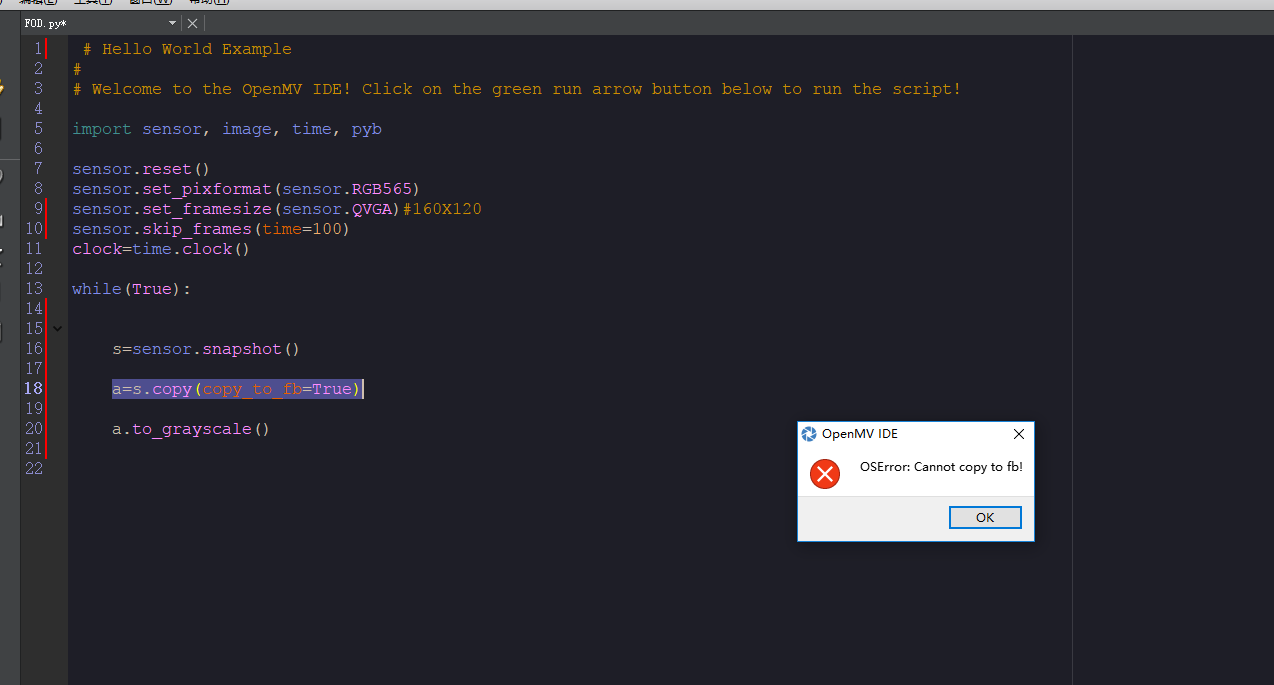
这是第二个代码,刚刚忘了贴
# Hello World Example # # Welcome to the OpenMV IDE! Click on the green run arrow button below to run the script! import sensor, image, time, pyb sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA)#160X120 sensor.skip_frames(time=100) clock=time.clock() while(True): s=sensor.snapshot() a=s.copy(copy_to_fb=True) a.to_grayscale() -
请问怎么在帧缓冲区显示想要看的图像发布在 OpenMV Cam
我设了一个变量s=sensor.snapshot(),然后让a=s,但是发现a灰度化后,帧缓冲区显示的是灰度化的图像,等于说显示的是a的图像。但是a不是在堆区存放吗?
# Hello World Example # # Welcome to the OpenMV IDE! Click on the green run arrow button below to run the script! import sensor, image, time, pyb sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA)#160X120 sensor.skip_frames(time=100) clock=time.clock() while(True): time_start = pyb.millis() scr_shot=sensor.snapshot() #scr_shot.lens_corr(1.8) a=scr_shot a.to_grayscale() duration = pyb.elapsed_millis(time_start) print(duration)不知道怎么才能让想要显示的图像显示在帧缓冲区,求教!!!
另外,这是另一个错误,麻烦帮忙解释一下
-
光流例程无法实现,最新版的固件不支持吗?发布在 OpenMV Cam
# MAVLink OpticalFlow Script. # # This script sends out OpticalFlow detections using the MAVLink protocol to # an LIGHT/PixHawk UAV controller for position control using your OpenMV Cam. # # P4 = TXD 115200,8,N,1 import sensor, image, time, pyb, struct, math sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.RGB565) # or sensor.GRAYSCALE sensor.set_framesize(sensor.B64x64) # or B40x30 or B64x64 clock = time.clock() # Tracks FPS. old = sensor.snapshot() uart = pyb.UART(3, 115200, timeout_char = 1000) def send_optical_flow_packet(x, y, c): temp = struct.pack("<bbiii", 0xAA, 0xAE, int(x * 100000 ), # up sample by 4 int(y * 100000 ), # up sample by 4 int(c * 100000)) uart.write(temp) while(True): clock.tick() # 获取时间 img = sensor.snapshot() # 获取一帧图像 ''' find_displacement 这个功能函数使用是是2D FFT算法获得新旧两张图像的相位移动,由于OPenMV上单片机内存的问题,只能计算 64x64或者64*32的图片(openmv2),如果使用OPenMV3可以计算128*32或者32*128的图片 ''' [delta_x, delta_y, response] = old.find_displacement(img) #获取前面一张图像与刚捕获的图像之间的偏移 old = img.copy() #print("%0.6fX %0.6fY %0.2fC %0.2fFPS" % (delta_x, delta_y, response, clock.fps())) if (not (math.isnan(delta_x) or math.isnan(delta_y) or math.isnan(response))): send_optical_flow_packet(delta_x, delta_y, response)