请问蜂鸣器的VCC引脚与OPENM4 H7 Plus的哪个引脚相连接?是VIN还是3.3V
V
vim1 发布的帖子
-
请问蜂鸣器的VCC引脚与OPENM4 H7 Plus的哪个引脚相连接?是VIN还是3.3V发布在 OpenMV Cam
-
光源扩展板做人脸识别亮度不够发布在 OpenMV Cam
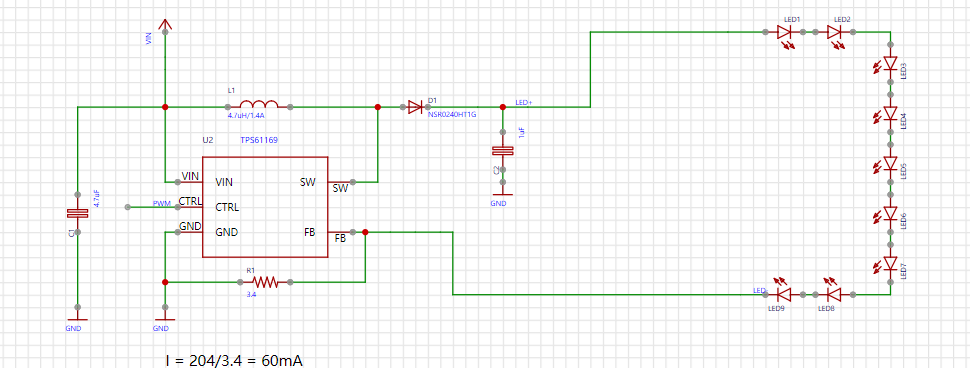
用了光源扩展板做人脸识别还是亮度不够,我自己重新做pcb的话,能不能在电路图上将九个LED改为十几个,比如15个,只增加串联LED的数量,会对整个电路结构、散热以及运行有影响吗?可行吗?
-
RE: 只运行人脸识别代码识别效果很好,但运行人脸追踪云台的代码发现识别效果差,但是这两段代码识别人脸代码是相同的,是为什么?发布在 OpenMV Cam
1.就是摄像头识别不出人脸,但是只用人脸识别的代码无论脸在哪都能识别,在人脸移动的时候也能看到一直能够识别出人脸,这两个的效果差异很明显,
2.我看他是识别到人脸云台才会运动,但现在就是识别不出人脸 -
只运行人脸识别代码识别效果很好,但运行人脸追踪云台的代码发现识别效果差,但是这两段代码识别人脸代码是相同的,是为什么?发布在 OpenMV Cam
#为什么只运行人脸识别代码识别效果很好,但运行人脸追踪云台的代码发现识别效果差,能够明显看到识别到的人脸矩形框断断续续,很多时候识别不到,但是这两段代码识别人脸代码是相同的,这是什么原因? # 人脸识别例程 # # 这个例子展示了OpenMV Cam的内置人脸检测功能。 # # 人脸检测通过在图像上使用Haar Cascade特征检测器来工作。 haar级联是 # 一系列简单的区域对比检查。 对于内置的前表面探测器,有25个阶段的检查, # 每个阶段有数百个检查一块。 Haar Cascades运行速度很快,因为只有在 # 以前的阶段过去后才会评估后期阶段。 此外,您的OpenMV使用称为 # 整体图像的数据结构来在恒定时间内快速执行每个区域对比度检查 #(特征检测仅为灰度的原因是因为整体图像的空间需求)。 import sensor, time, image # 重置感光元件 sensor.reset() # 感光元件设置 sensor.set_contrast(3) sensor.set_gainceiling(16) # HQVGA and GRAYSCALE are the best for face tracking. # HQVGA和灰度对于人脸识别效果最好 sensor.set_framesize(sensor.HQVGA) sensor.set_pixformat(sensor.GRAYSCALE) #注意人脸识别只能用灰度图哦 sensor.set_vflip(True) # 加载Haar算子 # 默认情况下,这将使用所有阶段,更低的satges更快,但不太准确。 face_cascade = image.HaarCascade("frontalface", stages=25) #image.HaarCascade(path, stages=Auto)加载一个haar模型。haar模型是二进制文件, #这个模型如果是自定义的,则引号内为模型文件的路径;也可以使用内置的haar模型, #比如“frontalface” 人脸模型或者“eye”人眼模型。 #stages值未传入时使用默认的stages。stages值设置的小一些可以加速匹配,但会降低准确率。 print(face_cascade) # FPS clock clock = time.clock() while (True): clock.tick() # 拍摄一张照片 img = sensor.snapshot() # Find objects. # Note: Lower scale factor scales-down the image more and detects smaller objects. # Higher threshold results in a higher detection rate, with more false positives. objects = img.find_features(face_cascade, threshold=0.75, scale=1.35) #image.find_features(cascade, threshold=0.5, scale=1.5),thresholds越大, #匹配速度越快,错误率也会上升。scale可以缩放被匹配特征的大小。 #在找到的目标上画框,标记出来 for r in objects: img.draw_rectangle(r) # 打印FPS。 # 注:实际FPS更高,流FB使它更慢。 print(clock.fps()) #人脸追踪云台代码 import sensor, image, time from pid import PID from pyb import Servo pan_servo=Servo(1) tilt_servo=Servo(2) pan_servo.calibration(500,2500,500) tilt_servo.calibration(500,1500,500) pan_servo.angle(10) tilt_servo.angle(50) pan_pid = PID(p=0.05, i=0, imax=90) #脱机运行或者禁用图像传输,使用这个PID tilt_pid = PID(p=0.01, i=0, imax=90) #脱机运行或者禁用图像传输,使用这个PID #pan_pid = PID(p=0.1, i=0, imax=90)#在线调试使用这个PID #tilt_pid = PID(p=0.1, i=0, imax=90)#在线调试使用这个PID sensor.set_contrast(3) sensor.set_gainceiling(16) sensor.set_vflip(True) sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.GRAYSCALE) # use RGB565. sensor.set_framesize(sensor.WVGA) # use QQVGA for speed. sensor.skip_frames(10) # Let new settings take affect. sensor.set_auto_whitebal(False) # turn this off. sensor.set_vflip(True) clock = time.clock() # Tracks FPS. face_cascade = image.HaarCascade("frontalface", stages=25) def find_max(blobs): max_size=0 for blob in blobs: if blob[2]*blob[3] > max_size: max_blob=blob max_size = blob[2]*blob[3] return max_blob while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() # Take a picture and return the image. blobs = img.find_features(face_cascade, threshold=0.75, scale=1.5)#返回外接矩形框 # 一个矩形元组(x, y, w, h)x-左上角的x位置 y-左上角的y位置 w-宽度 h-高度,也可以索引[0][1][2][3]取得这个值。 if blobs: max_blob = find_max(blobs) pan_error = max_blob[0]+max_blob[2]/2-img.width()/2 tilt_error = max_blob[1]+max_blob[3]/2-img.height()/2 print("pan_error: ", pan_error) print("tilt_error: ", tilt_error) img.draw_rectangle(max_blob) # rect img.draw_cross(int(max_blob[0]+max_blob[2]/2), int(max_blob[1]+max_blob[3]/2)) # cx, cy pan_output=pan_pid.get_pid(pan_error,1)/2 tilt_output=tilt_pid.get_pid(tilt_error,1) print("pan_output",pan_output) pan_servo.angle(pan_servo.angle()+pan_output) tilt_servo.angle(tilt_servo.angle()-tilt_output)