# Find Rects Example
#
# This example shows off how to find rectangles in the image using the quad threshold
# detection code from our April Tags code. The quad threshold detection algorithm
# detects rectangles in an extremely robust way and is much better than Hough
# Transform based methods. For example, it can still detect rectangles even when lens
# distortion causes those rectangles to look bent. Rounded rectangles are no problem!
# (But, given this the code will also detect small radius circles too)...
import sensor, image, time, math, pyb
from pyb import UART
import lcd
sensor.reset()
sensor.set_contrast(1)
sensor.set_brightness(1)
sensor.set_saturation(1)
sensor.set_gainceiling(16)
#sensor.set_pixformat(sensor.GRAYSCALE)
sensor.set_pixformat(sensor.RGB565) # grayscale is faster (160x120 max on OpenMV-M7)
sensor.set_framesize(sensor.QQVGA)
#sensor.set_windowing((340, 340)) #数据映射
sensor.skip_frames(time = 2000)
clock = time.clock()
uart = UART(3, 115200)
lcd.init()
led = pyb.LED(1)
#计算左右两边直线长度
def cal_line(corners):
x1 = corners[0][0]
y1 = corners[0][1]
x2 = corners[1][0]
y2 = corners[1][1]
x3 = corners[2][0]
y3 = corners[2][1]
x4 = corners[3][0]
y4 = corners[3][1]
#计算长度
yl1 = math.sqrt(math.pow((x1-x4),2) + math.pow((y1-y4),2))
yl2 = math.sqrt(math.pow((x2-x3),2) + math.pow((y2-y3),2))
return yl1,yl2
def FindMaxBlobs(BlobList):
#寻找最大色块
most_pixels = 0
largest_blob = 0
if BlobList:
for i in range(len(BlobList)):#range()创建一个整数列表
if BlobList[i].pixels() > most_pixels:
most_pixels = BlobList[i].pixels()
largest_blob = i
return BlobList[largest_blob]
return None
#发送uart数据
def send_uart(Type,x,y,s):
output_str="%d,%d,%d,%d" % (Type,x,y,s)
uart.write(output_str+'\r\n')
print(output_str)
blank_thresholds = [(3, 35, -52, 47, -128, 126)]
red_threshold = [(19, 100, 25, 74, -128, 127)]
#blank_thresholds=[(140, 255)]
while(True):
Type = 255
P0 = -1
P1 = -1
P2 = -1
PL1 = -1
LP2 = -1
clock.tick()
img = sensor.snapshot().lens_corr(1.8)
img.binary(red_threshold)
#img.erode(3)
#img.dilate(1)
#img.erode(3)
#img.dilate(1)
if img.find_blobs(red_threshold,merge=True):
led.on()
blobs = img.find_blobs(red_threshold,pixels_threshold=3,merge=True)
r = FindMaxBlobs(blobs)
#for r in img.find_blobs(blank_thresholds,pixels_threshold=10,merge=True):
img.draw_rectangle(r.rect(), color = (0, 0, 0))
for p in r.corners(): img.draw_circle(p[0], p[1], 5, color = (0, 255, 0))
if r.w() * r.h()>200:
Type = 1
P0 = r.x() + r.w()//2
P1 = r.y() + r.h()//2
P2 = r.w() * r.h()//100
(PL1,PL2) = cal_line(r.corners())
#print(PL1,PL2)
send_uart(Type,P0,P1,P2)
else:
Type = 255
send_uart(255,-1,-1,-1)
if Type == 1:
led.on()
else:
led.off()
lcd.display(img)
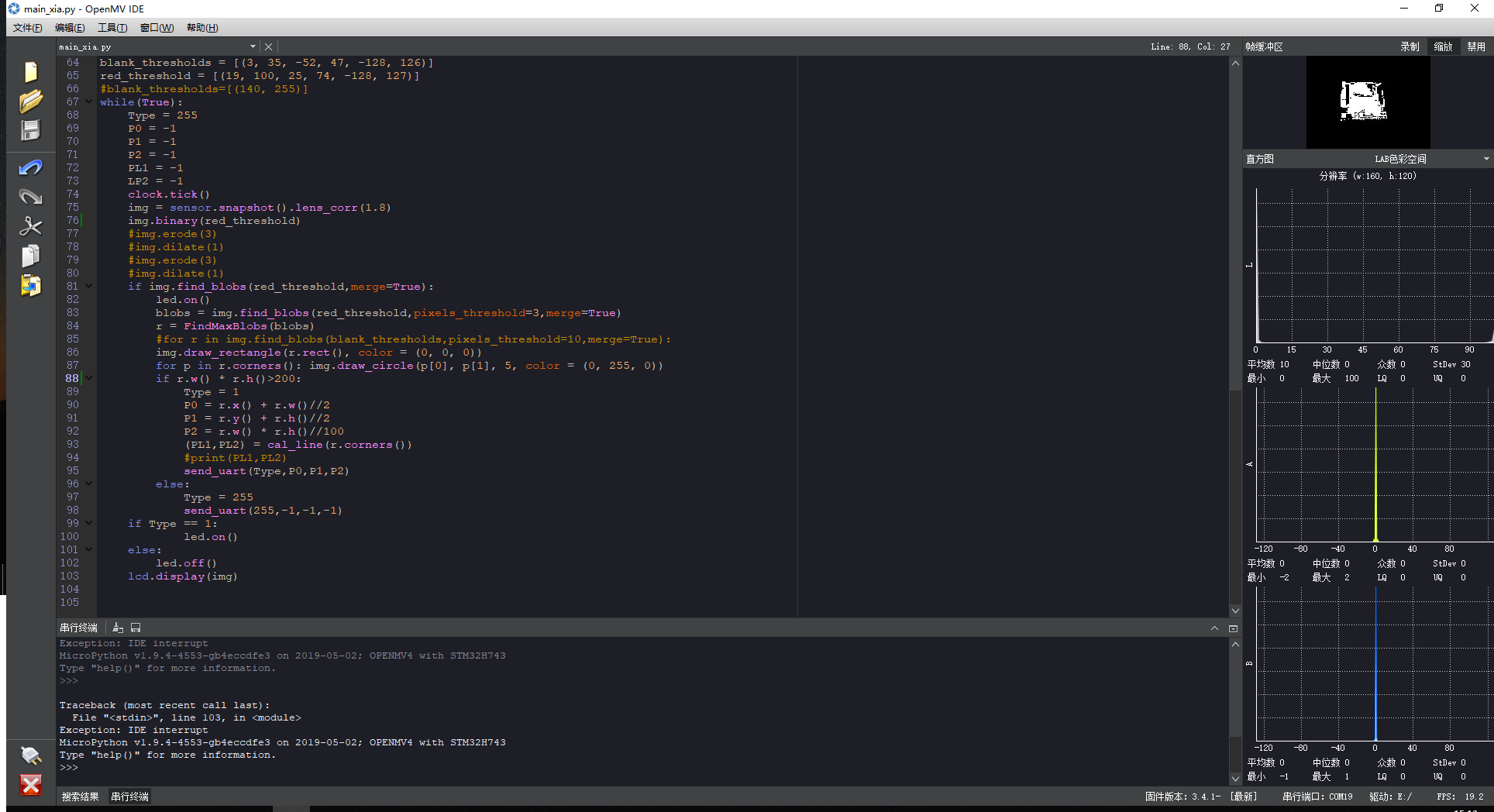
使用以上代码对图片先进行二值化然后查找红色色块,二值化阈值与查找色块阈值为同一红色阈值,一开始会检测到并框出,但是莫名就不能检测了,求教