你好,内存卡格式化之后,重新建的相关文件夹,重试之后设置的拍摄20张,但还是第一次只拍10张,修改序号后,第二次拍第一张后就失败断开
P
pt6u 发布的帖子
-
人脸分辨采集失败问题发布在 OpenMV Cam
例程代码设置的20张采集样本,结果第一次运行只采集了10张就停了,然后修改num为1后,再次运行代码,只采集一次,机器就断开连接了,内存卡是16G的,对内存卡的识别也是正常的
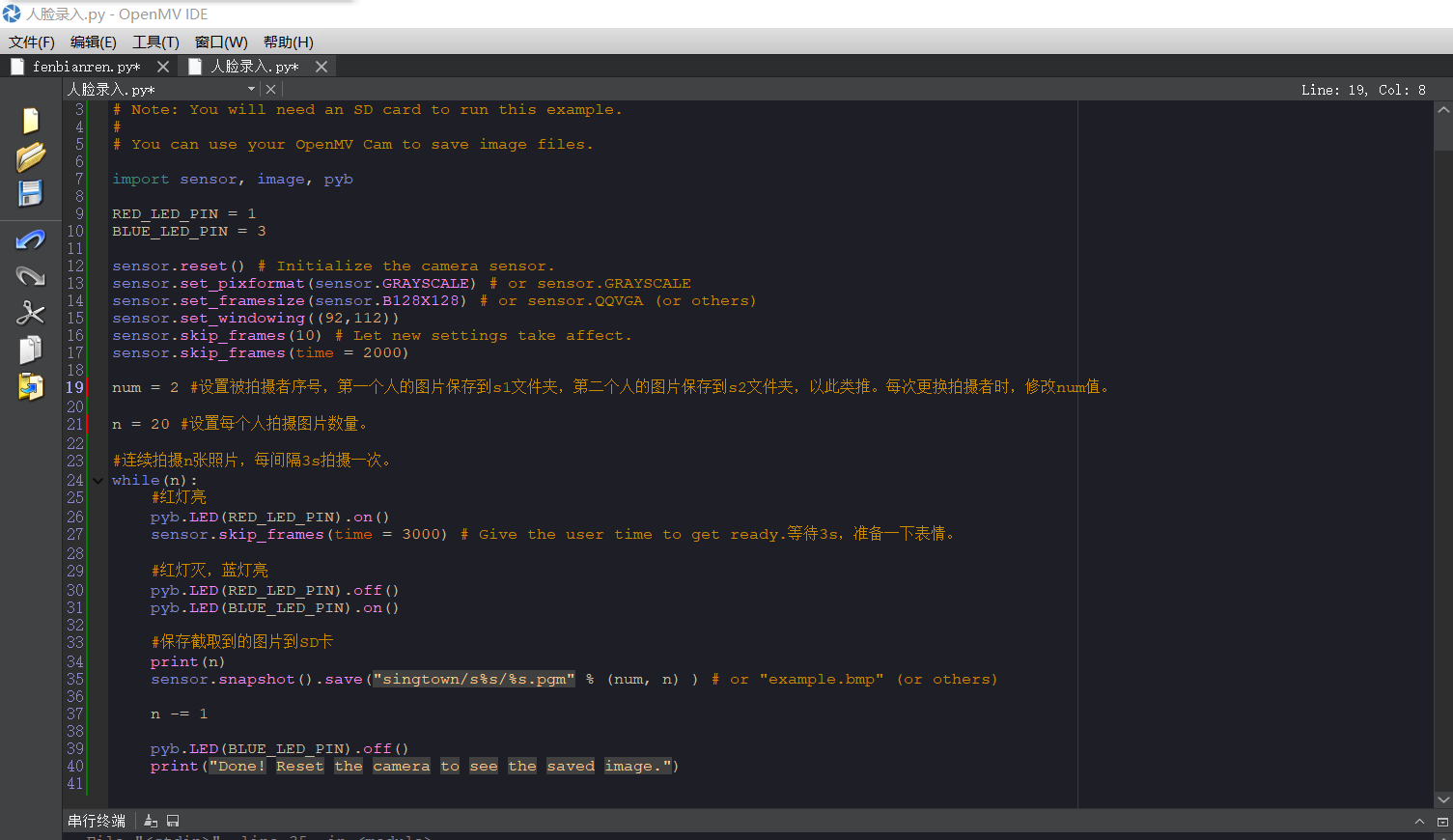
# Snapshot Example # # Note: You will need an SD card to run this example. # # You can use your OpenMV Cam to save image files. import sensor, image, pyb RED_LED_PIN = 1 BLUE_LED_PIN = 3 sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.GRAYSCALE sensor.set_framesize(sensor.B128X128) # or sensor.QQVGA (or others) sensor.set_windowing((92,112)) sensor.skip_frames(10) # Let new settings take affect. sensor.skip_frames(time = 2000) num = 2 #设置被拍摄者序号,第一个人的图片保存到s1文件夹,第二个人的图片保存到s2文件夹,以此类推。每次更换拍摄者时,修改num值。 n = 20 #设置每个人拍摄图片数量。 #连续拍摄n张照片,每间隔3s拍摄一次。 while(n): #红灯亮 pyb.LED(RED_LED_PIN).on() sensor.skip_frames(time = 3000) # Give the user time to get ready.等待3s,准备一下表情。 #红灯灭,蓝灯亮 pyb.LED(RED_LED_PIN).off() pyb.LED(BLUE_LED_PIN).on() #保存截取到的图片到SD卡 print(n) sensor.snapshot().save("singtown/s%s/%s.pgm" % (num, n) ) # or "example.bmp" (or others) n -= 1 pyb.LED(BLUE_LED_PIN).off() print("Done! Reset the camera to see the saved image.") -
RE: 关于颜色识别和形状同时识别出现的问题发布在 OpenMV Cam
最开始就是全部打印出来的,但其他的参数没有用,所以我打印了statistics.l_mode() statistics.a_mode() statistics.b_mode() 这三个参数,这三个参数就是if语句的判断条件,打印出来的结果是满足if语句的,但问题就是没运行if语句下的代码
-
RE: 关于颜色识别和形状同时识别出现的问题发布在 OpenMV Cam
你好,没有说同时执行if,else语句,我意思是在代码满足if语句条件的时候,但他没运行if语句下的代码块,而是运行了else下的代码块,这几天我测试发现把这一句:
if 0<statistics.l_mode()<36 and -20<statistics.a_mode()<10 and -10<statistics.b_mode()<-128:
中的and全部改成or的时候才能满足判断语句,然后运行if下的语句,但是我看颜色与形状识别视频教程时,教程用的就是and语句 -
关于颜色识别和形状同时识别出现的问题发布在 OpenMV Cam
请问我在做颜色和形状同时识别时,为什么在满足if语句的条件时,程序还在执行else的语句(判断条件的色块范围我是根据打印的众数写的范围,因为之前试了多颜色例程中的蓝色的色块范围不行)
import sensor, image, time sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking clock = time.clock() while(True): clock.tick() img = sensor.snapshot().lens_corr(1.8) for c in img.find_circles(threshold = 3500, x_margin = 10, y_margin = 10, r_margin = 10, r_min = 2, r_max = 100, r_step = 2): area = (c.x()-c.r(), c.y()-c.r(), 2*c.r(), 2*c.r()) #area为识别到的圆的区域,即圆的外接矩形框 statistics = img.get_statistics(roi=area)#像素颜色统计 print(statistics.l_mode(),statistics.a_mode(),statistics.b_mode()) #(0,100,0,120,0,120)是红色的阈值,所以当区域内的众数(也就是最多的颜色),范围在这个阈值内,就说明是红色的圆。 #l_mode(),a_mode(),b_mode()是L通道,A通道,B通道的众数。 if 0<statistics.l_mode()<36 and -20<statistics.a_mode()<10 and -10<statistics.b_mode()<-128:#if the circle is red img.draw_circle(c.x(), c.y(), c.r(), color = (0, 0, 255))#识别到的红色圆形用红色的圆框出来 print(1) else: img.draw_rectangle(area, color = (255, 255, 255)) print(2) #将非红色的圆用白色的矩形框出来 -
关于利用识别线段来识别三角形的问题发布在 OpenMV Cam
在代码中 sum+=l.theta()一直报错,改为将l.theta()改为其他类型,还是报错,请问怎样解决啊
import sensor, image, time, math sensor.reset() sensor.set_pixformat(sensor.RGB565) # 灰度更快 sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) clock = time.clock() # 所有线段都有 `x1()`, `y1()`, `x2()`, and `y2()` 方法来获得他们的终点 # 一个 `line()` 方法来获得所有上述的四个元组值,可用于 `draw_line()`. while(True): clock.tick() img = sensor.snapshot() if enable_lens_corr: img.lens_corr(1.8) # for 2.8mm lens... for l in img.find_line_segments(merge_distance = 10, max_theta_diff = 10): img.draw_line(l.line(), color = (255, 0, 0)) sum+=l.theta() sum-=180 if sum<110 and sum>1: print('三角形') num_segment=1 -
关于利用瞳孔识别判断眨眼次数的问题发布在 OpenMV Cam
最初的想法就是通过瞳孔识别进行眨眼次数的判断,当闭眼时,则无法识别到瞳孔,则num加一。我是通过调取瞳孔识别函数的返回的一个固定值,作为标志项,进行判断的,但是发现几个问题,一个是打印出的num速度过快,加了定时器还是一样的结果。还有就是将第一个判断语句的等号变成不等号,那代码将不往下执行打印,但显然当识别不到瞳孔的时候,标志不相等应该是恒成立的。代码如下,求大佬解惑
import sensor, time, image from pyb import Timer sensor.reset() sensor.set_contrast(3) sensor.set_gainceiling(16) sensor.set_framesize(sensor.VGA) sensor.set_windowing((220, 190, 200, 100)) sensor.set_pixformat(sensor.GRAYSCALE) num=0 flag=0 eyes_cascade = image.HaarCascade("eye", stages=24) clock = time.clock() while (True): clock.tick() img = sensor.snapshot() eyes = img.find_features(eyes_cascade, threshold=0.5, scale_factor=1.5) for e in eyes: iris = img.find_eye(e) img.draw_rectangle(e) img.draw_cross(iris[0], iris[1]) a=str(img.draw_cross(iris[0], iris[1]).copy()) flag=int(a[5]) def ad(timer): global num num=num+1 tim = Timer(2, freq=1) if flag==2: tim.callback(ad) print(num) else: print(1) -
请问怎样让整个程序运行结束再回到程序开头继续运行发布在 OpenMV Cam
import sensor, time, image, pyb
from pyb import UARTsensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.GRAYSCALE
sensor.set_framesize(sensor.B128X128) # or sensor.QQVGA (or others)
sensor.set_windowing((92,112))
sensor.skip_frames(10) # Let new settings take affect.
sensor.skip_frames(time = 5000) #等待5suart = UART(3, 115200)
while(True):
if uart.any():
a=uart.readline().decode().strip()
print(a)
break#SUB = "s1"
NUM_SUBJECTS = 2 #图像库中不同人数,一共6人
NUM_SUBJECTS_IMGS = 20 #每人有20张样本图片img = sensor.snapshot()
#img = image.Image("singtown/%s/1.pgm"%(SUB))
d0 = img.find_lbp((0, 0, img.width(), img.height()))
#d0为当前人脸的lbp特征
img = None
pmin = 999999
num=0def min(pmin, a, s):
global num
if a<pmin:
pmin=a
num=s
return pminfor s in range(1, NUM_SUBJECTS+1):
dist = 0
for i in range(2, NUM_SUBJECTS_IMGS+1):
img = image.Image("singtown/s%d/%d.pgm"%(s, i))
d1 = img.find_lbp((0, 0, img.width(), img.height()))
#d1为第s文件夹中的第i张图片的lbp特征
dist += image.match_descriptor(d0, d1)#计算d0 d1即样本图像与被检测人脸的特征差异度。
print("Average dist for subject %d: %d"%(s, dist/NUM_SUBJECTS_IMGS))
pmin = min(pmin, dist/NUM_SUBJECTS_IMGS, s)#特征差异度越小,被检测人脸与此样本更相似更匹配。
print(pmin)
#print(2)print(num) # num为当前最匹配的人的编号。
uart.write(str(num)+'\r\n')我想让人脸识别结束后,将结果发送出去后,再回到程序开始的串口接收部分继续运行程序,请问该怎样弄? -
请问openmv接收到数据后,怎样继续运行后面的代码?谢谢了发布在 OpenMV Cam
import sensor, time, image, pyb from pyb import UART from pyb import Pin, ExtInt uart = UART(3, 115200) while(True): if uart.any(): a=uart.readline().decode().strip() print(a) sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.GRAYSCALE sensor.set_framesize(sensor.B128X128) # or sensor.QQVGA (or others) sensor.set_windowing((92,112)) sensor.skip_frames(10) # Let new settings take affect. sensor.skip_frames(time = 5000) #等待5s #SUB = "s1" NUM_SUBJECTS = 2 #图像库中不同人数,一共6人 NUM_SUBJECTS_IMGS = 20 #每人有20张样本图片 # 拍摄当前人脸。 img = sensor.snapshot() #img = image.Image("singtown/%s/1.pgm"%(SUB)) d0 = img.find_lbp((0, 0, img.width(), img.height())) #d0为当前人脸的lbp特征 img = None pmin = 999999 num=0 def min(pmin, a, s): global num if a<pmin: pmin=a num=s return pmin for s in range(1, NUM_SUBJECTS+1): dist = 0 for i in range(2, NUM_SUBJECTS_IMGS+1): img = image.Image("singtown/s%d/%d.pgm"%(s, i)) d1 = img.find_lbp((0, 0, img.width(), img.height())) #d1为第s文件夹中的第i张图片的lbp特征 dist += image.match_descriptor(d0, d1)#计算d0 d1即样本图像与被检测人脸的特征差异度。 print("Average dist for subject %d: %d"%(s, dist/NUM_SUBJECTS_IMGS)) pmin = min(pmin, dist/NUM_SUBJECTS_IMGS, s)#特征差异度越小,被检测人脸与此样本更相似更匹配。 print(pmin) print(num) # num为当前最匹配的人的编号。 uart.write(str(num)+'\r\n')我在串口助手上发0给openmv,串行终端读到了0,然后就停在了那一步,我想问一下怎样修改代码,可以让openmv接收到数据后,能继续运行后面的人脸识别程序
-
请问我的这个中断代码用的对不对,有问题的话,麻烦给小白讲一下发布在 OpenMV Cam
import sensor, time, image, pyb from pyb import UART from pyb import Pin, ExtInt pin0 = Pin('P0', Pin.IN, Pin.PULL_UP) def callback_PIN0(line): pin0.value()==0 pyb.delay(10) extint = pyb.ExtInt(pin0, pyb.ExtInt.IRQ_FALLING, pyb.Pin.PULL_UP, callback_PIN0) while(True): if pin0.value()==0: uart = UART(3, 115200) if uart.any(): a=uart.readline().decode().strip() pyb.delay(10) sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.GRAYSCALE sensor.set_framesize(sensor.B128X128) # or sensor.QQVGA (or others) sensor.set_windowing((92,112)) sensor.skip_frames(10) # Let new settings take affect. sensor.skip_frames(time = 5000) #等待5s #SUB = "s1" NUM_SUBJECTS = 2 #图像库中不同人数,一共6人 NUM_SUBJECTS_IMGS = 20 #每人有20张样本图片 # 拍摄当前人脸。 img = sensor.snapshot() #img = image.Image("singtown/%s/1.pgm"%(SUB)) d0 = img.find_lbp((0, 0, img.width(), img.height())) #d0为当前人脸的lbp特征 img = None pmin = 999999 num=0 def min(pmin, a, s): global num if a<pmin: pmin=a num=s return pmin for s in range(1, NUM_SUBJECTS+1): dist = 0 for i in range(2, NUM_SUBJECTS_IMGS+1): img = image.Image("singtown/s%d/%d.pgm"%(s, i)) d1 = img.find_lbp((0, 0, img.width(), img.height())) #d1为第s文件夹中的第i张图片的lbp特征 dist += image.match_descriptor(d0, d1)#计算d0 d1即样本图像与被检测人脸的特征差异度。 print("Average dist for subject %d: %d"%(s, dist/NUM_SUBJECTS_IMGS)) pmin = min(pmin, dist/NUM_SUBJECTS_IMGS, s)#特征差异度越小,被检测人脸与此样本更相似更匹配。 print(pmin) print(num) # num为当前最匹配的人的编号。 uart.write(str(num)+'\r\n') 主要想实现stm32发送信息给openmv,用来触发openmv中断下的接收函数,在接受到信息后,能运行人脸识别程序,再将openmv人脸识别结果发给32 -
求助关于人脸分辨的相关问题发布在 OpenMV Cam
你好请问这个人脸识别代码为什么不能输出num的值,串行口显示没有输出值,万分感谢
import sensor, time, image, pyb sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.GRAYSCALE sensor.set_framesize(sensor.B128X128) # or sensor.QQVGA (or others) sensor.set_windowing((92,112)) sensor.skip_frames(10) # Let new settings take affect. sensor.skip_frames(time = 5000) #等待5s num = 0 def min(pmin, a, s): global num print(00000000) if a < pmin: pmin = a num = s return pmin sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.GRAYSCALE sensor.set_framesize(sensor.B128X128) # or sensor.QQVGA (or others) sensor.set_windowing((92,112)) sensor.skip_frames(10) # Let new settings take affect. sensor.skip_frames(time = 5000) #等待5s NUM_SUBJECTS = 2 NUM_SUBJECTS_IMGS = 20 img = sensor.snapshot() d0 = img.find_lbp((0, 0, img.width(), img.height())) img = None pmin = 999999 num = 0 for s in range(1, NUM_SUBJECTS + 1): dist = 0 for i in range(2, NUM_SUBJECTS_IMGS + 1): img = image.Image("singtown/s%d/%d.pgm" % (s, i)) d1 = img.find_lbp((0, 0, img.width(), img.height())) dist += image.match_descriptor(d0, d1) print("Average dist for subject %d: %d" % (s, dist / NUM_SUBJECTS_IMGS)) pmin = min(pmin, dist / NUM_SUBJECTS_IMGS, s) print(pmin) if dist / NUM_SUBJECTS_IMGS == pmin: num = s print(num) -
关于onenet和openmv之间的相关问题?发布在 OpenMV Cam
请问我现在想将openmv的图片截取一张传给onenet平台,openmv这边可以实现吗?如果可以的话,能否通过stm32来发送这个截取图片的命令
-
关于openmv串口发送问题发布在 OpenMV Cam
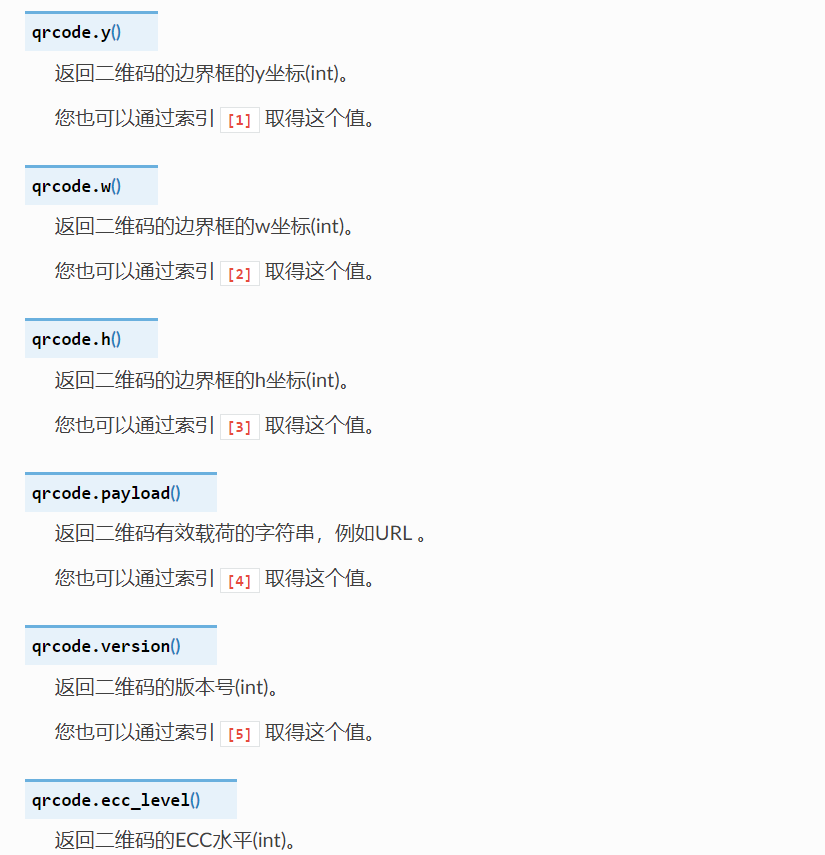
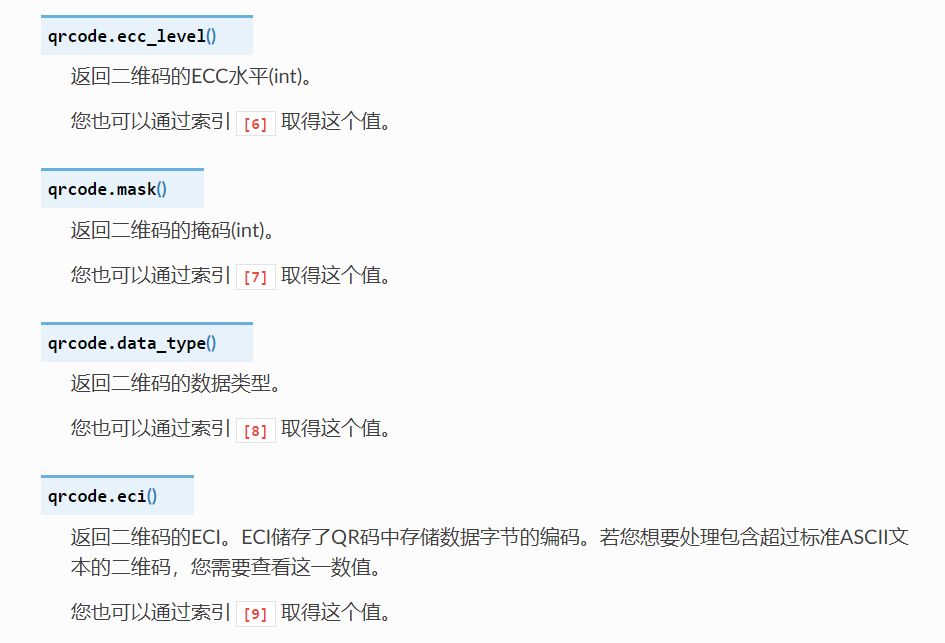
想通过串口给32发送mv识别二维码
 的信息,但只想发送四个xywh坐标,不想发送其他的信息,但是改的代码却把qrcode函数下的九类信息全发到调试助手上了,请问怎样修改才能让只发送qrcodes函数下的一部分信息给别的单片机?拜托了!
的信息,但只想发送四个xywh坐标,不想发送其他的信息,但是改的代码却把qrcode函数下的九类信息全发到调试助手上了,请问怎样修改才能让只发送qrcodes函数下的一部分信息给别的单片机?拜托了!import sensor, image, time from pyb import UART import json sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must turn this off to prevent image washout... clock = time.clock() uart = UART(3, 115200) while(True): clock.tick() img = sensor.snapshot() img.lens_corr(1.8) # strength of 1.8 is good for the 2.8mm lens. for code in img.find_qrcodes(): img.draw_rectangle(code.rect(), color = (255, 0, 0)) output_str = json.dumps(code) print('you send:',output_str) uart.write(output_str+'\n') else: print('not found!')