import time, sensor, image
from image import SEARCH_EX, SEARCH_DS
sensor.reset()
sensor.set_contrast(1)
sensor.set_gainceiling(16)
sensor.set_framesize(sensor.QQVGA)
sensor.set_pixformat(sensor.GRAYSCALE)
templates = ["/2zuo.pgm","/2you.pgm","/6zuo.pgm","/6you.pgm"] #保存多个模板
#加载模板图片
sensor.set_vflip(True) #设置图像水平方向的翻转
sensor.set_hmirror(True) #设置图像垂直方向的翻转
while (True):
img = sensor.snapshot()
for t in templates:
template = image.Image(t)
#对每个模板遍历进行模板匹配
r = img.find_template(template, 0.60, step=4, search=SEARCH_EX)#,roi=(0, 0, 160, 160))
if r :
if t==2zuo.pgm or t==2you.pgm :
templates = ["/2zuo.pgm","/2you.pgm"]
if t==6zuo.pgm or t==6you.pgm :
templates = ["/6zuo.pgm","/6you.pgm"]
while True :
img = sensor.snapshot()
for t in templates:
template = image.Image(t)
#对每个模板遍历进行模板匹配
r = img.find_template(template, 0.60, step=4, search=SEARCH_EX)#,roi=(0, 0, 160, 160))
if r:
img.draw_rectangle(r)
print(t) #打印模板名字
#print(r) #输出识别到的目标的坐标(x,y,w,h)这个高度中间是64,r[0]就是x的坐标
if r[0]<64 :
print("左边")
if r[0]>64 :
print("右边")
O
oyeh 发布的帖子
-
if t==2zuo.pgm or t==2you.pgm : 她说这个是无效语法发布在 OpenMV Cam
-
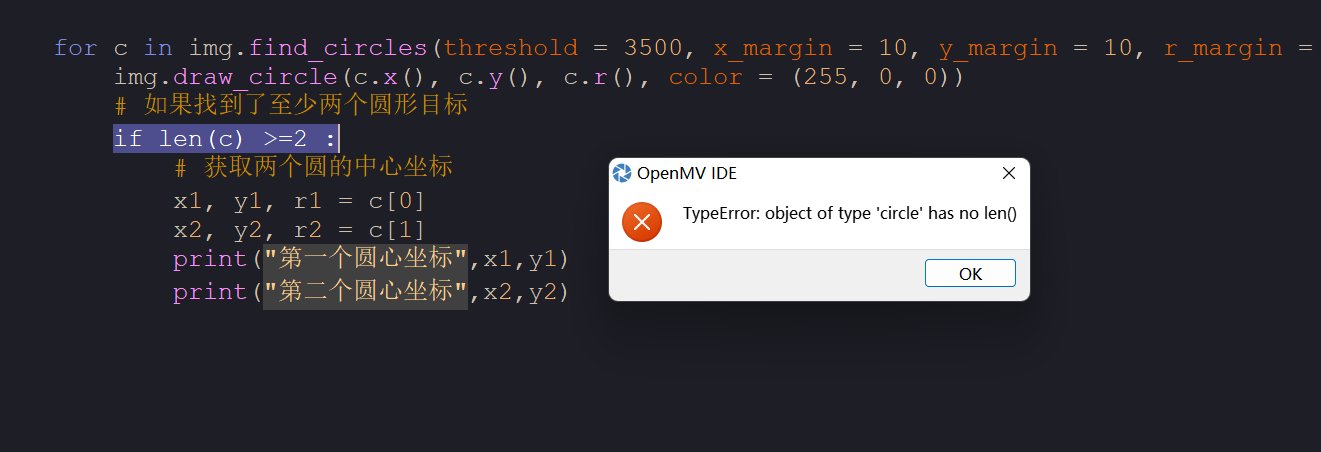
多模板匹配的例程用不了,保存图片到内存了,出现报错,报错在图片上发布在 OpenMV Cam
# Template Matching Example - Normalized Cross Correlation (NCC) # # 这个例子展示了如何使用OpenMV凸轮的NCC功能将小部分图像与图像的各个部分 # 进行匹配...期望获得极其可控的环境NCC并不是全部有用的。 # # 警告:NCC支持需要重做!到目前为止,这个功能需要做大量的工作才能有用。 # 这个脚本将重新表明功能的存在,但在目前的状态是不足的。 import time, sensor, image from image import SEARCH_EX, SEARCH_DS #从imgae模块引入SEARCH_EX和SEARCH_DS。使用from import仅仅引入SEARCH_EX, #SEARCH_DS两个需要的部分,而不把image模块全部引入。 # Reset sensor sensor.reset() # Set sensor settings sensor.set_contrast(1) sensor.set_gainceiling(16) # Max resolution for template matching with SEARCH_EX is QQVGA sensor.set_framesize(sensor.QQVGA) # You can set windowing to reduce the search image. #sensor.set_windowing(((640-80)//2, (480-60)//2, 80, 60)) sensor.set_pixformat(sensor.GRAYSCALE) # Load template. # Template should be a small (eg. 32x32 pixels) grayscale image. templates = ["/5.pgm", "/1.pgm"] #保存多个模板 #加载模板图片 clock = time.clock() # Run template matching while (True): clock.tick() img = sensor.snapshot() # find_template(template, threshold, [roi, step, search]) # ROI: The region of interest tuple (x, y, w, h). # Step: The loop step used (y+=step, x+=step) use a bigger step to make it faster. # Search is either image.SEARCH_EX for exhaustive search or image.SEARCH_DS for diamond search # # Note1: ROI has to be smaller than the image and bigger than the template. # Note2: In diamond search, step and ROI are both ignored. for t in templates: template = image.Image(t) #对每个模板遍历进行模板匹配 r = img.find_template(template, 0.70, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60)) #find_template(template, threshold, [roi, step, search]),threshold中 #的0.7是相似度阈值,roi是进行匹配的区域(左上顶点为(10,0),长80宽60的矩形), #注意roi的大小要比模板图片大,比frambuffer小。 #把匹配到的图像标记出来 if r: img.draw_rectangle(r) print(t) #打印模板名字 #print(clock.fps())
-
RE: 我不小心接了3.3V供电怎么办,还是和USB一起接的。。。。。。。。。。发布在 OpenMV Cam
就是我接了3.3V那个引脚供电,而且还插着USB,但是没环,不是不能用3.3V引脚供电吗,他现在还能用,好像没什么异常。。。。怎么办
-
串口通信发送负数问题,我发的是负1,但是单片机接收那边是255发布在 OpenMV Cam
import time, pyb
from pyb import UARTuart = UART(3, 9600) #参数1:使用串口3 参数2:波特率是4800
led1 = pyb.LED(1) #红
led2 = pyb.LED(2) #绿
led3 = pyb.LED(3) #蓝
while(True):
#串口发送数据
uart.writechar(-1)#发送数字
time.sleep(3) -
怎么对提取到的中文二维码信息判断,它现在显示我的判断语句语法是错误的发布在 OpenMV Cam
while(True): clock.tick() img = sensor.snapshot() img.lens_corr(1.8) 。 for code in img.find_qrcodes(): img.draw_rectangle(code.rect(), color = (255, 0, 0)) erweima=code.payload() if erweimaa == 红色蓝色 print(erweima) -
帮我看看这个问题,她说b没有定义发布在 OpenMV Cam
import time, pyb from pyb import UART uart = UART(3, 19200) #参数1:使用串口3 参数2:波特率是19200 led1 = pyb.LED(1) led2 = pyb.LED(2) led3 = pyb.LED(3) while(True): uart.write("Hello World!\r") #参数就是需要发送的数据 time.sleep_ms(1000) #串口接收函数函数 if uart.any() : a = uart.readline().decode() b=int(a) #将字符串转换为数字 if b == 1 : led1.on() led2.on() time.sleep_ms(150) led1.off() led2.off() time.sleep_ms(150)她说b变量没定义,怎么回事