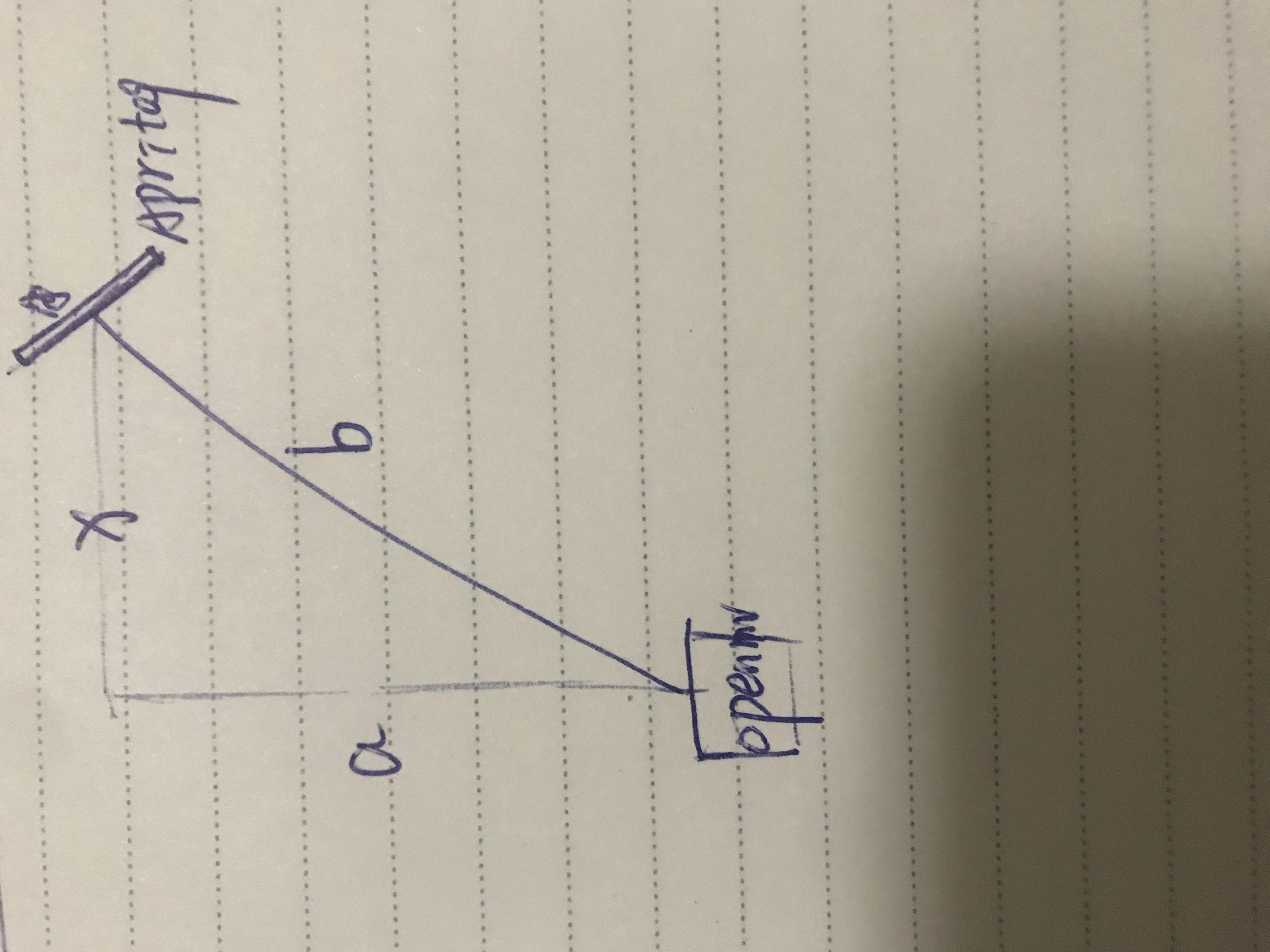
tag与openmv之间位置关系如图,(在一个水平面上),测得的Tx是图中的a还是b呢?
G
g5of
@g5of
0
声望
8
楼层
538
资料浏览
0
粉丝
0
关注
g5of 发布的帖子
-
Apriltag3D定位中Tag 与openMV之间有角度和左右偏差时,得到的Tx是哪个距离呢发布在 OpenMV Cam
-
RE: find_apriltags_3d_pose怎么矫正degrees(tag.y_rotation()输出的角度呢?发布在 OpenMV Cam
仪器精度误差没这么大,openmv固定还算准,Apriltag摆放角度是拿量角器量的,误差都没这么大。
你测得是准的嘛,你用的程序是上面那个吗,我试了试更离谱,难道我用的镜头不适用这俩程序?
-
RE: find_apriltags_3d_pose怎么矫正degrees(tag.y_rotation()输出的角度呢?发布在 OpenMV Cam
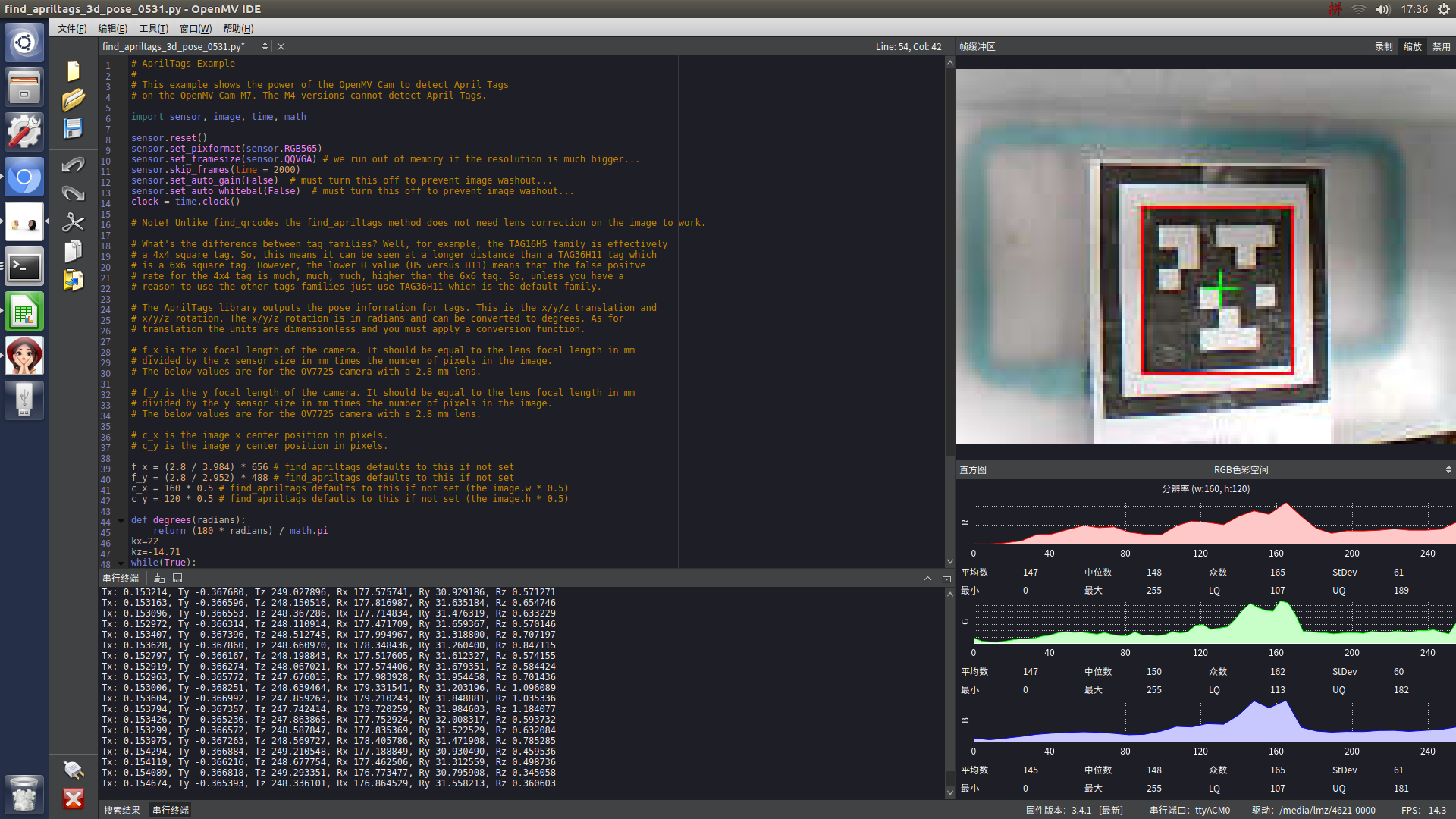
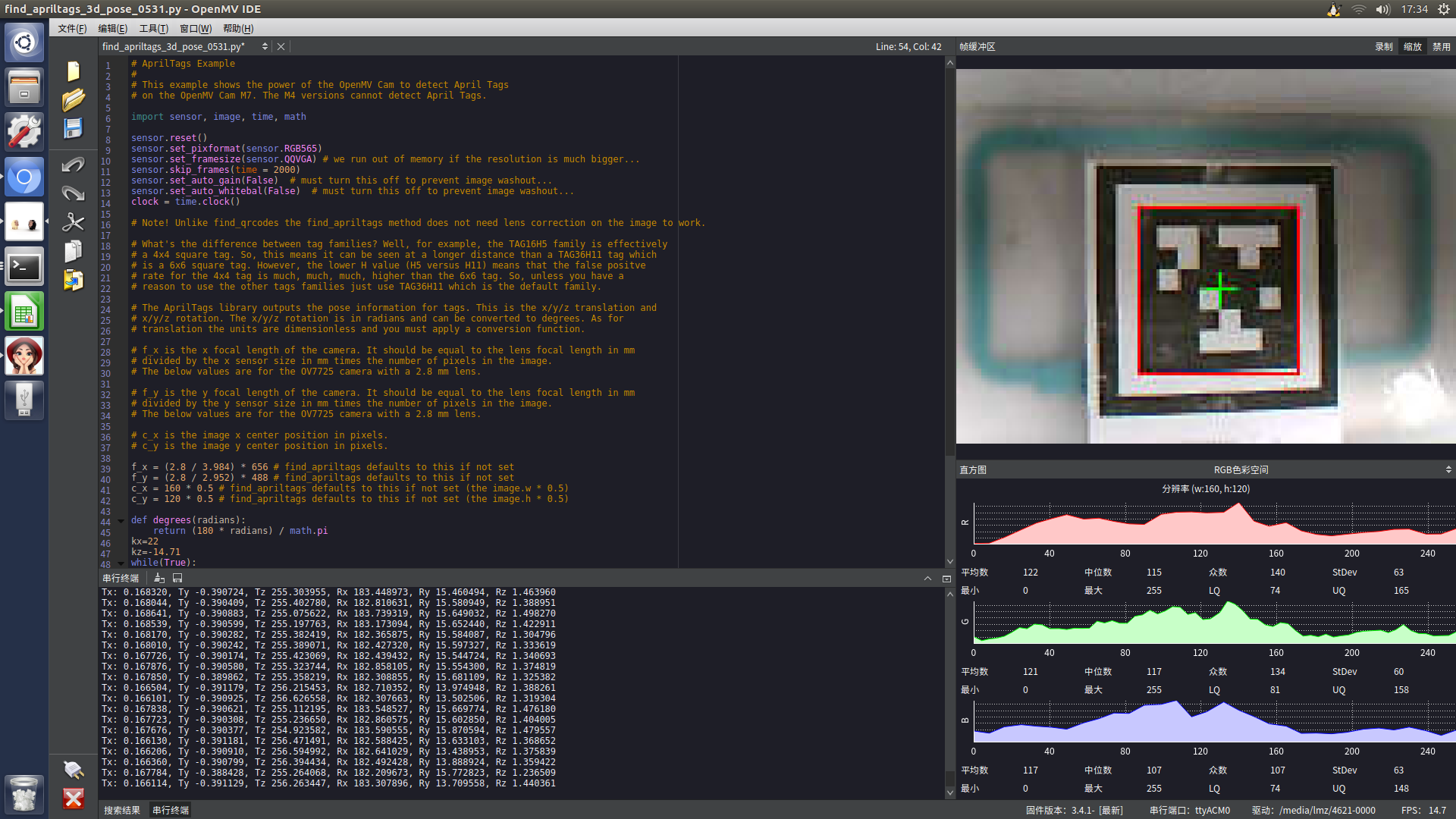
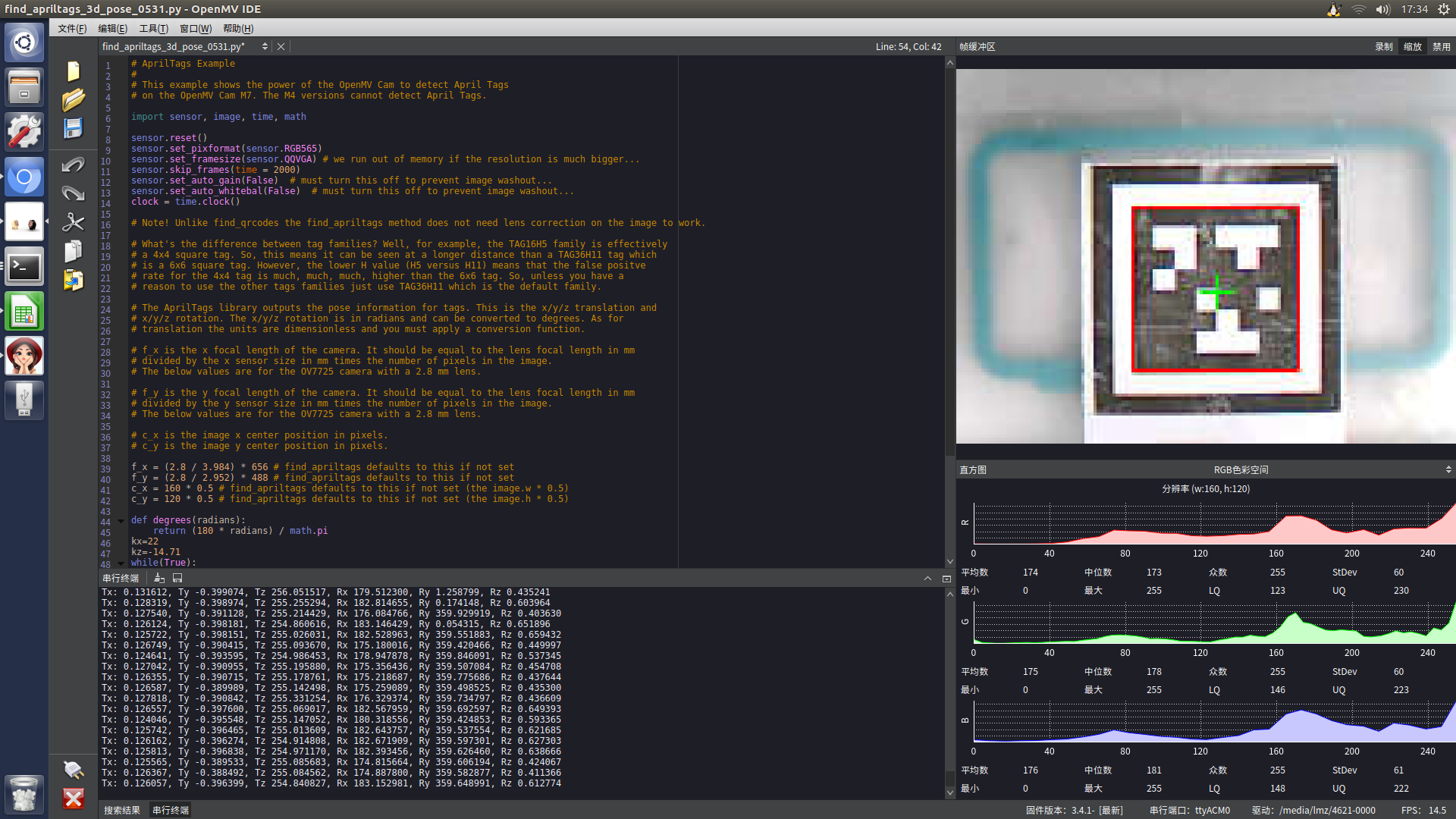
三张图片里Ry的实际值分别应该是360.10.20左右,但测得的是360,15,30左右,就是说,第一张图片里Ry应该是20左右,第二张图片里应该是10左右才对
-
RE: find_apriltags_3d_pose怎么矫正degrees(tag.y_rotation()输出的角度呢?发布在 OpenMV Cam
@kidswong999
我在Ry方向间隔10度变化一次,测得的Ry变化角度不对,请教该怎么调呢 -
RE: find_apriltags_3d_pose怎么矫正degrees(tag.y_rotation()输出的角度呢?发布在 OpenMV Cam
静止没什么问题,是测变化幅度不准,我把tag水平旋转一定角度,他测得的角度变化幅度(Ry变化度数)不对
-
RE: find_apriltags_3d_pose怎么矫正degrees(tag.y_rotation()输出的角度呢?发布在 OpenMV Cam
Ry测得不太准,角度变化幅度差个10度左右,要用来测偏航角,可以怎么调呢
-
find_apriltags_3d_pose怎么矫正degrees(tag.y_rotation()输出的角度呢?发布在 OpenMV Cam
我使用find_apriltags_3d_pose进行定位,使用的是自带的例程,degrees(tag.y_rotation()输出的角度误差有点大,怎么矫正呢?