论坛里面大多数方法我都试了,返回的都是1,我就觉得很奇怪
def find_max(blobs):
max_size=0
for blob in blobs:
if blob[2]*blob[3] > max_size:
max_blob=blob
max_size = blob[2]*blob[3]
print(max_blob.code())
return max_blob
论坛里面大多数方法我都试了,返回的都是1,我就觉得很奇怪
def find_max(blobs):
max_size=0
for blob in blobs:
if blob[2]*blob[3] > max_size:
max_blob=blob
max_size = blob[2]*blob[3]
print(max_blob.code())
return max_blob
请问这个扫码识别得到的code.payload(),扫码结果是123+321 ,我将它赋值给message,然后通过比对message是否等于字符串123+321,一直显示不相等,请问这个code,payload()输出的是什么类型的数据啊?
while(b==1):
img = sensor.snapshot()
img.lens_corr(1.8) # strength of 1.8 is good for the 2.8mm lens.
for code in img.find_qrcodes():
img.draw_rectangle(code.rect(), color = (255, 0, 0))
message = code.payload()
if message =='123+321'
print("0")
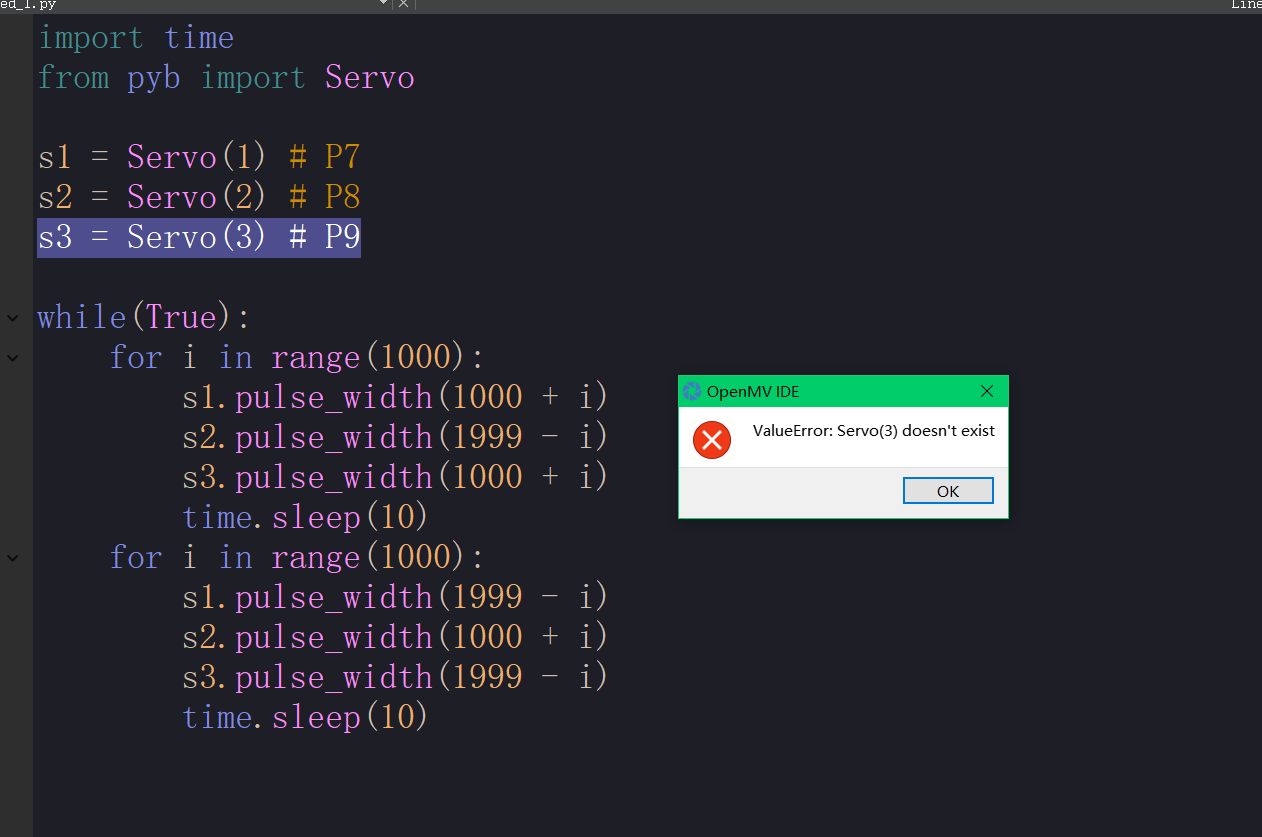
请问一个关于openmv的图像识别的问题。
我想要识别出结果后停止识别,让openmv驱动舵机工作相应的角度,工作完后openmv再图像识别,再驱动舵机,如此反复,请问这个怎么实现。
但是他每抓取一次图片,执行一次if语句,视频窗口会很卡顿,这个怎么解决呢
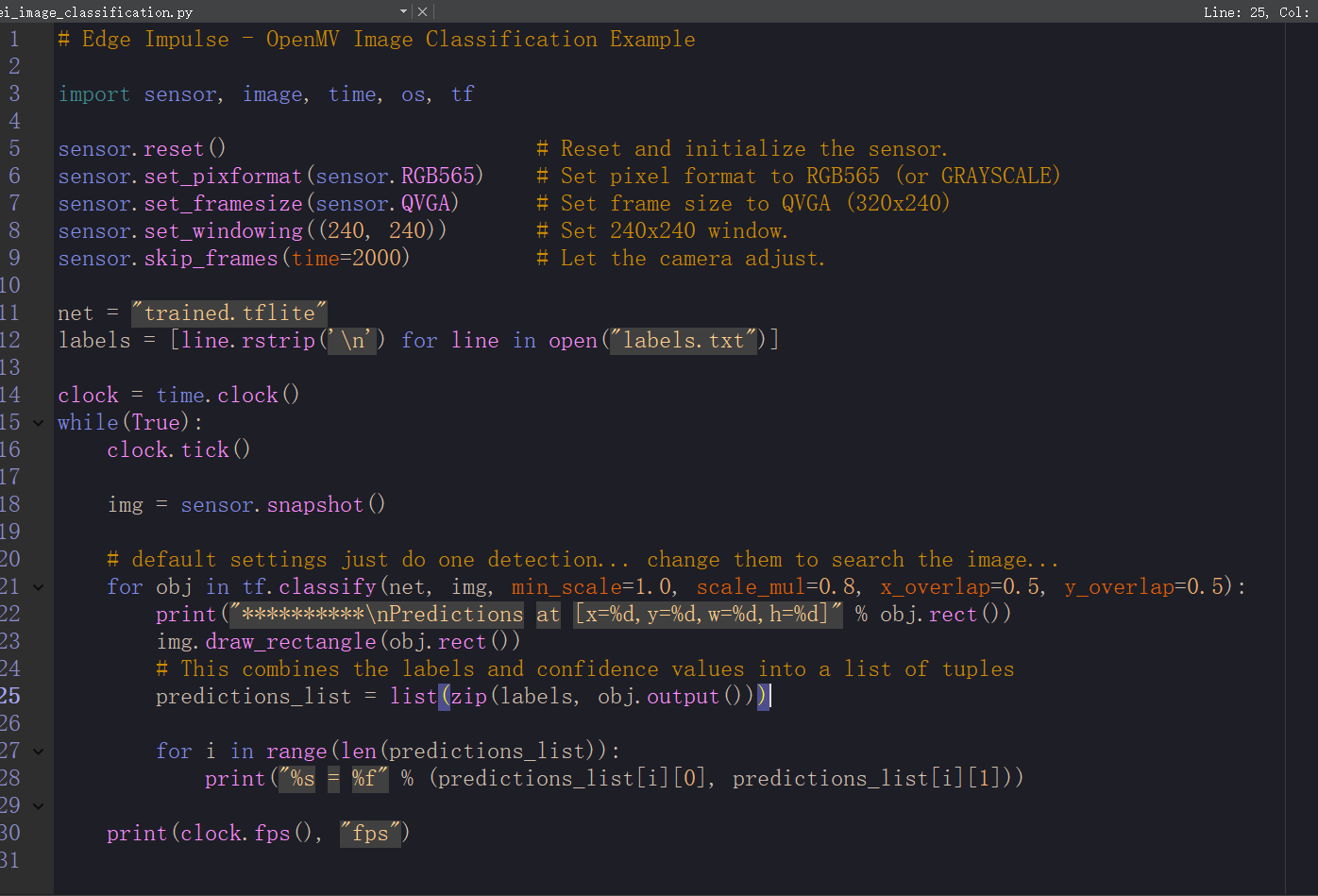
# Edge Impulse - OpenMV Image Classification Example
import sensor, image, time, os, tf
sensor.reset() # Reset and initialize the sensor.
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
sensor.set_windowing((240, 240)) # Set 240x240 window.
sensor.skip_frames(time=2000) # Let the camera adjust.
net = "trained.tflite"
labels = [line.rstrip('\n') for line in open("labels.txt")]
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot()
# default settings just do one detection... change them to search the image...
for obj in tf.classify(net, img, min_scale=1.0, scale_mul=0.8, x_overlap=0.5, y_overlap=0.5):
print("**********\nPredictions at [x=%d,y=%d,w=%d,h=%d]" % obj.rect())
img.draw_rectangle(obj.rect())
# This combines the labels and confidence values into a list of tuples
predictions_list = list(zip(labels, obj.output()))
for i in range(len(predictions_list)):
print("%s = %f" % (predictions_list[i][0], predictions_list[i][1]))
print(clock.fps(), "fps")