请问一下,openmv图像识别的例程,如何根据四种不同的识别结果驱动舵机旋转不同的角度啊。想知道怎么增加或者修改程序
-
-
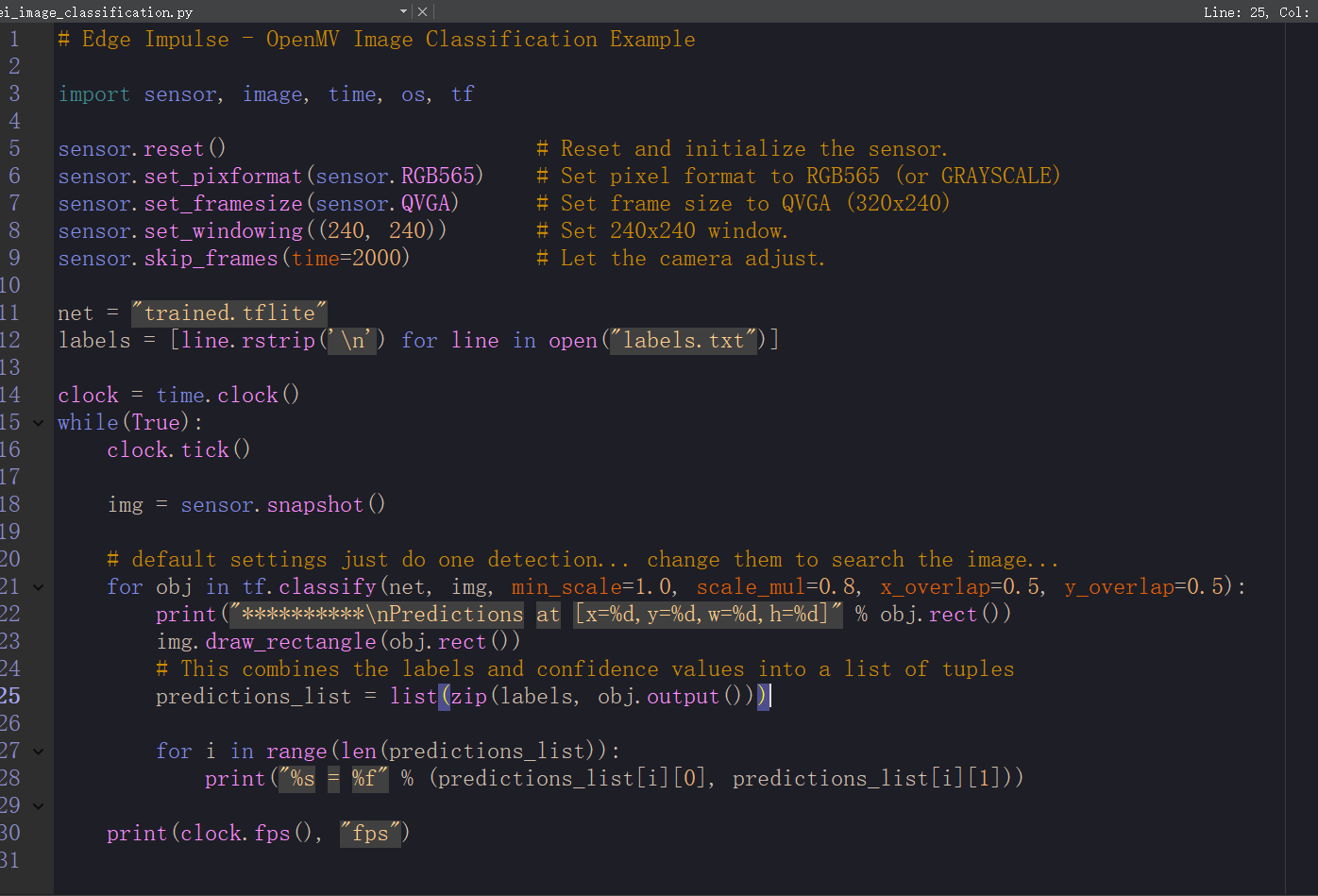
# Edge Impulse - OpenMV Image Classification Example import sensor, image, time, os, tf sensor.reset() # Reset and initialize the sensor. sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE) sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240) sensor.set_windowing((240, 240)) # Set 240x240 window. sensor.skip_frames(time=2000) # Let the camera adjust. net = "trained.tflite" labels = [line.rstrip('\n') for line in open("labels.txt")] clock = time.clock() while(True): clock.tick() img = sensor.snapshot() # default settings just do one detection... change them to search the image... for obj in tf.classify(net, img, min_scale=1.0, scale_mul=0.8, x_overlap=0.5, y_overlap=0.5): print("**********\nPredictions at [x=%d,y=%d,w=%d,h=%d]" % obj.rect()) img.draw_rectangle(obj.rect()) # This combines the labels and confidence values into a list of tuples predictions_list = list(zip(labels, obj.output())) for i in range(len(predictions_list)): print("%s = %f" % (predictions_list[i][0], predictions_list[i][1])) print(clock.fps(), "fps")
-
obj.output()就是一个列表,里面是每个的值。写一个if判断就行。
-
但是他每抓取一次图片,执行一次if语句,视频窗口会很卡顿,这个怎么解决呢
-
没法解决,每秒智能识别3帧左右,所以你每秒只能看到3帧,所以就会觉得卡。
-
此回复已被删除!
-
此回复已被删除!