你好,请问神经网络训练出来可以识别其它东西了吗
D
dx1g 发布的帖子
-
请问如何在openmv的lenet.network网络模型自己训练lenet模型使用。发布在 OpenMV Cam
请问如何在openmv M4的lenet.network网络模型自己训练lenet模型使用。
-
openmv网络连接,wifi图传的wifi模块是什么,可以不用它的wifi拓展版吗?发布在 OpenMV Cam
openmv网络连接,wifi图传的wifi模块是什么,可以不用它的wifi拓展版吗?
-
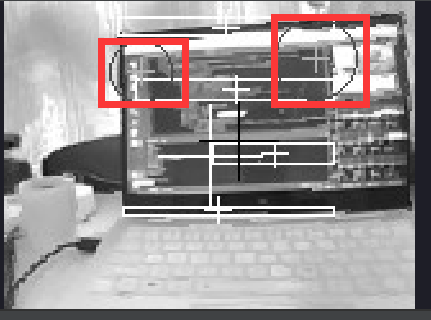
RE: 霍夫检测找圆代码中,为什么会将不是圆形物体乱识别成圆?发布在 OpenMV Cam
如果我将threshold的增大了,检测到的圆是少了,但同时找圆的时间也长了,如果我摄像头稍微晃动,就找不到圆了,但我需要一直有圆的坐标值返回
-
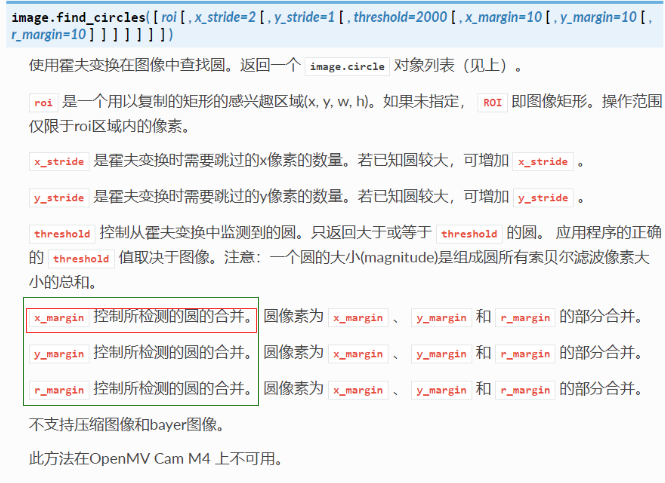
openmv中识别圆的代码参数不理解发布在 OpenMV Cam
 openmv
openmv
图片中的x_margin、y_margin、r_margin这三个参数是什么意思,控制所检测的圆的合并是什么意思?麻烦指导下,谢谢! -
代码中的角度值deflection_angle表示什么发布在 OpenMV Cam
# Black Grayscale Line Following Example # # Making a line following robot requires a lot of effort. This example script # shows how to do the machine vision part of the line following robot. You # can use the output from this script to drive a differential drive robot to # follow a line. This script just generates a single turn value that tells # your robot to go left or right. # # For this script to work properly you should point the camera at a line at a # 45 or so degree angle. Please make sure that only the line is within the # camera's field of view. import sensor, image, time, math # Tracks a black line. Use [(128, 255)] for a tracking a white line. GRAYSCALE_THRESHOLD = [(0, 64)] #设置阈值,如果是黑线,GRAYSCALE_THRESHOLD = [(0, 64)]; #如果是白线,GRAYSCALE_THRESHOLD = [(128,255)] # Each roi is (x, y, w, h). The line detection algorithm will try to find the # centroid of the largest blob in each roi. The x position of the centroids # will then be averaged with different weights where the most weight is assigned # to the roi near the bottom of the image and less to the next roi and so on. ROIS = [ # [ROI, weight] (0, 100, 160, 20, 0.7), # You'll need to tweak the weights for you app (0, 050, 160, 20, 0.3), # depending on how your robot is setup. (0, 000, 160, 20, 0.1) ] #roi代表三个取样区域,(x,y,w,h,weight),代表左上顶点(x,y)宽高分别为w和h的矩形, #weight为当前矩形的权值。注意本例程采用的QQVGA图像大小为160x120,roi即把图像横分成三个矩形。 #三个矩形的阈值要根据实际情况进行调整,离机器人视野最近的矩形权值要最大, #如上图的最下方的矩形,即(0, 100, 160, 20, 0.7) # Compute the weight divisor (we're computing this so you don't have to make weights add to 1). weight_sum = 0 #权值和初始化 for r in ROIS: weight_sum += r[4] # r[4] is the roi weight. #计算权值和。遍历上面的三个矩形,r[4]即每个矩形的权值。 # Camera setup... sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.GRAYSCALE) # use grayscale. sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed. sensor.skip_frames(30) # Let new settings take affect. sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking #关闭白平衡 clock = time.clock() # Tracks FPS. while(True): clock.tick() # Track elapsed milliseconds between snapshots(). img = sensor.snapshot() # Take a picture and return the image. centroid_sum = 0 #利用颜色识别分别寻找三个矩形区域内的线段 for r in ROIS: blobs = img.find_blobs(GRAYSCALE_THRESHOLD, roi=r[0:4], merge=True) # r[0:4] is roi tuple. #找到视野中的线,merge=true,将找到的图像区域合并成一个 #目标区域找到直线 if blobs: # Find the index of the blob with the most pixels. most_pixels = 0 largest_blob = 0 for i in range(len(blobs)): #目标区域找到的颜色块(线段块)可能不止一个,找到最大的一个,作为本区域内的目标直线 if blobs[i].pixels() > most_pixels: most_pixels = blobs[i].pixels() #merged_blobs[i][4]是这个颜色块的像素总数,如果此颜色块像素总数大于 #most_pixels,则把本区域作为像素总数最大的颜色块。更新most_pixels和largest_blob largest_blob = i # Draw a rect around the blob. img.draw_rectangle(blobs[largest_blob].rect()) img.draw_rectangle((0,0,30, 30)) #将此区域的像素数最大的颜色块画矩形和十字形标记出来 img.draw_cross(blobs[largest_blob].cx(), blobs[largest_blob].cy()) centroid_sum += blobs[largest_blob].cx() * r[4] # r[4] is the roi weight. #计算centroid_sum,centroid_sum等于每个区域的最大颜色块的中心点的x坐标值乘本区域的权值 center_pos = (centroid_sum / weight_sum) # Determine center of line. #中间公式 # Convert the center_pos to a deflection angle. We're using a non-linear # operation so that the response gets stronger the farther off the line we # are. Non-linear operations are good to use on the output of algorithms # like this to cause a response "trigger". deflection_angle = 0 #机器人应该转的角度 # The 80 is from half the X res, the 60 is from half the Y res. The # equation below is just computing the angle of a triangle where the # opposite side of the triangle is the deviation of the center position # from the center and the adjacent side is half the Y res. This limits # the angle output to around -45 to 45. (It's not quite -45 and 45). deflection_angle = -math.atan((center_pos-80)/60) #角度计算.80 60 分别为图像宽和高的一半,图像大小为QQVGA 160x120. #注意计算得到的是弧度值 # Convert angle in radians to degrees. deflection_angle = math.degrees(deflection_angle) #将计算结果的弧度值转化为角度值 # Now you have an angle telling you how much to turn the robot by which # incorporates the part of the line nearest to the robot and parts of # the line farther away from the robot for a better prediction. print("Turn Angle: %f" % deflection_angle) #将结果打印在terminal中 print(clock.fps()) # Note: Your OpenMV Cam runs about half as fast while # connected to your computer. The FPS should increase once disconnected.代码中的角度值deflection_angle表示什么,(center_pos-80)/60,分母为60,如果视野中是直线,但center_pos偏差值很大,那么也会返回一个很大的角度,这样不就不对了吗