@kidswong999 谢谢 这个问题我解决了,现在可以发一个字节的数据了,但是我需要的是发送一个数组,我看您回复列表数据时提到了uart.write() 可以发送数组
uart怎么发送列表数据
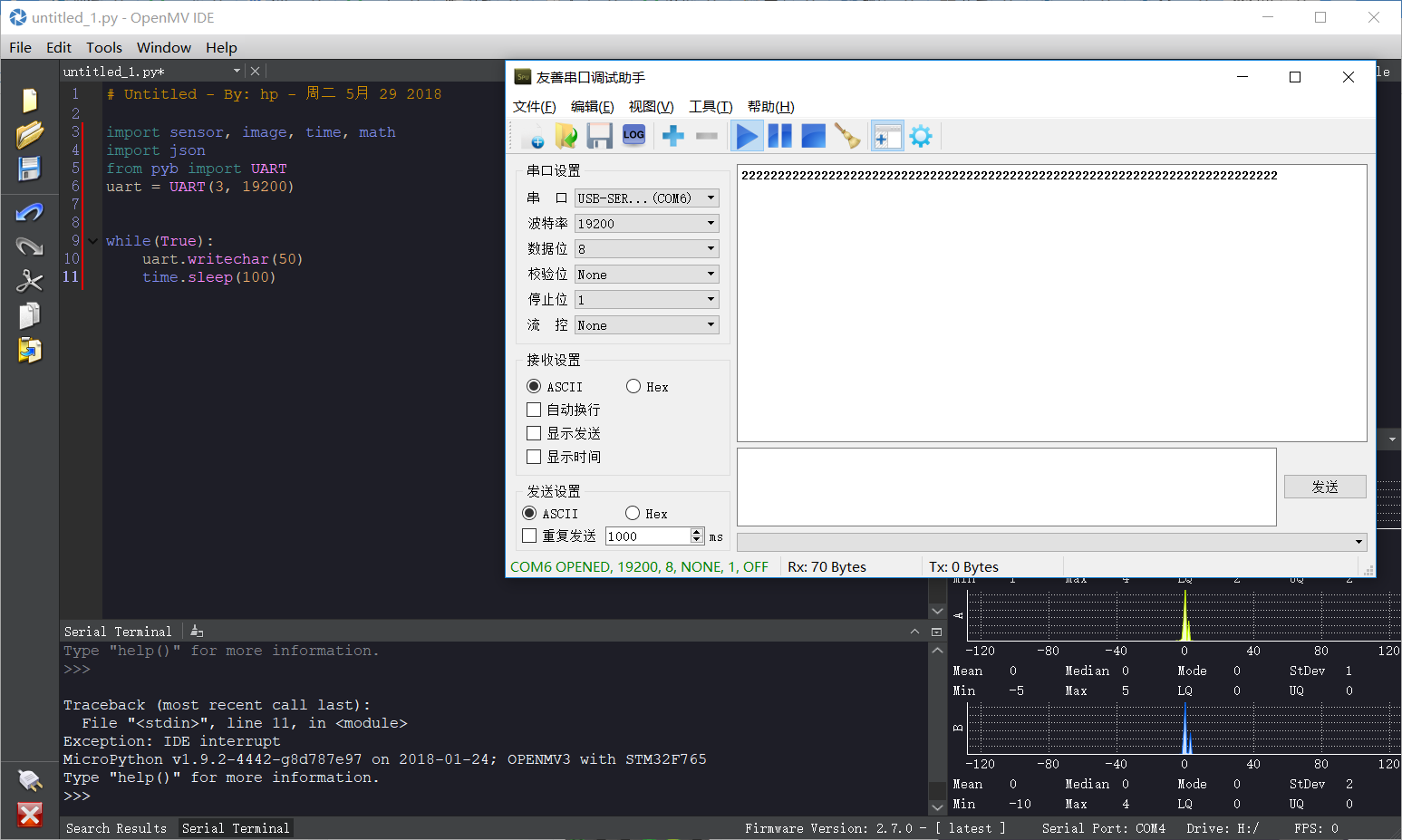
import sensor, image, time, math
import json
from pyb import UART
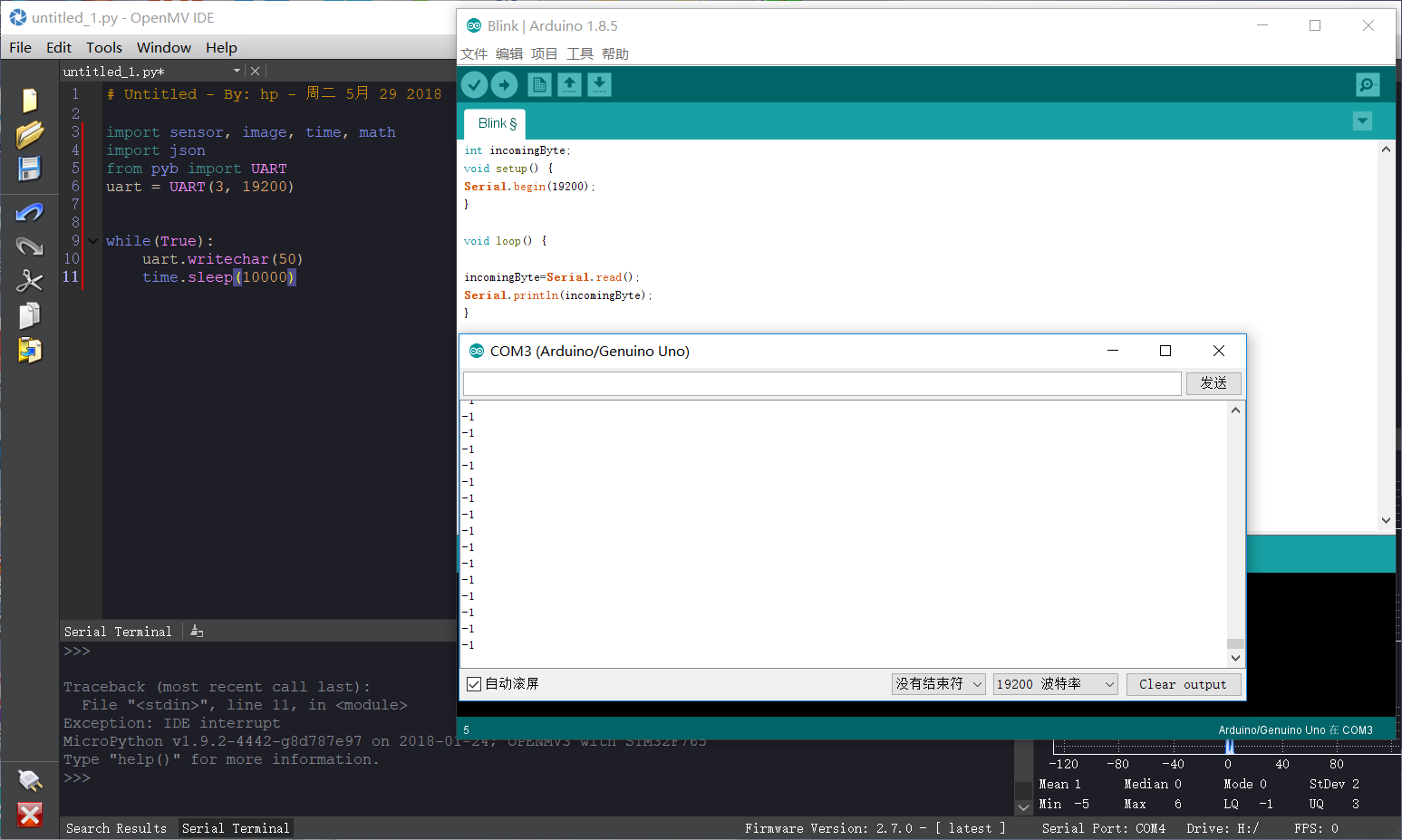
uart = UART(3, 9600)
data = bytearray([0xFF, 0xFE, 0xFF, 0xFF, 0x1A, 0x4E])
while(True):
uart.write(data)
这个我接上串口助手看到是 FF FE FF FF 1A 4E
如果我想在arduino端接收这个数据,该如何下手呢?
数组传送的过程中是否包含了“ ”(空格)呢