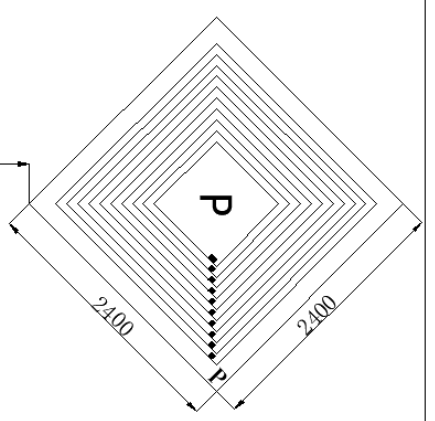
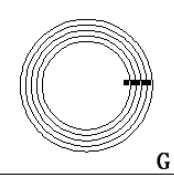
请问openmv如何识别这两种图形?
计算出矩形中心和圆环中心的位置,给无人机降落用的
4
4qwo
@4qwo
1
声望
7
楼层
757
资料浏览
0
粉丝
0
关注
4qwo 发布的帖子
-
OPENMV通过陀螺仪融合数据获得正确的物体位置发布在 OpenMV Cam
OPENMV安装在无人机底部,追踪色块,无人机飞行时会倾斜导致无法正确获得物体位置,请问有什么办法或者算法能通过角度数据消除误差,达到物体在无人机正下方的时候怎么旋转位置都不应该改变的目的
-
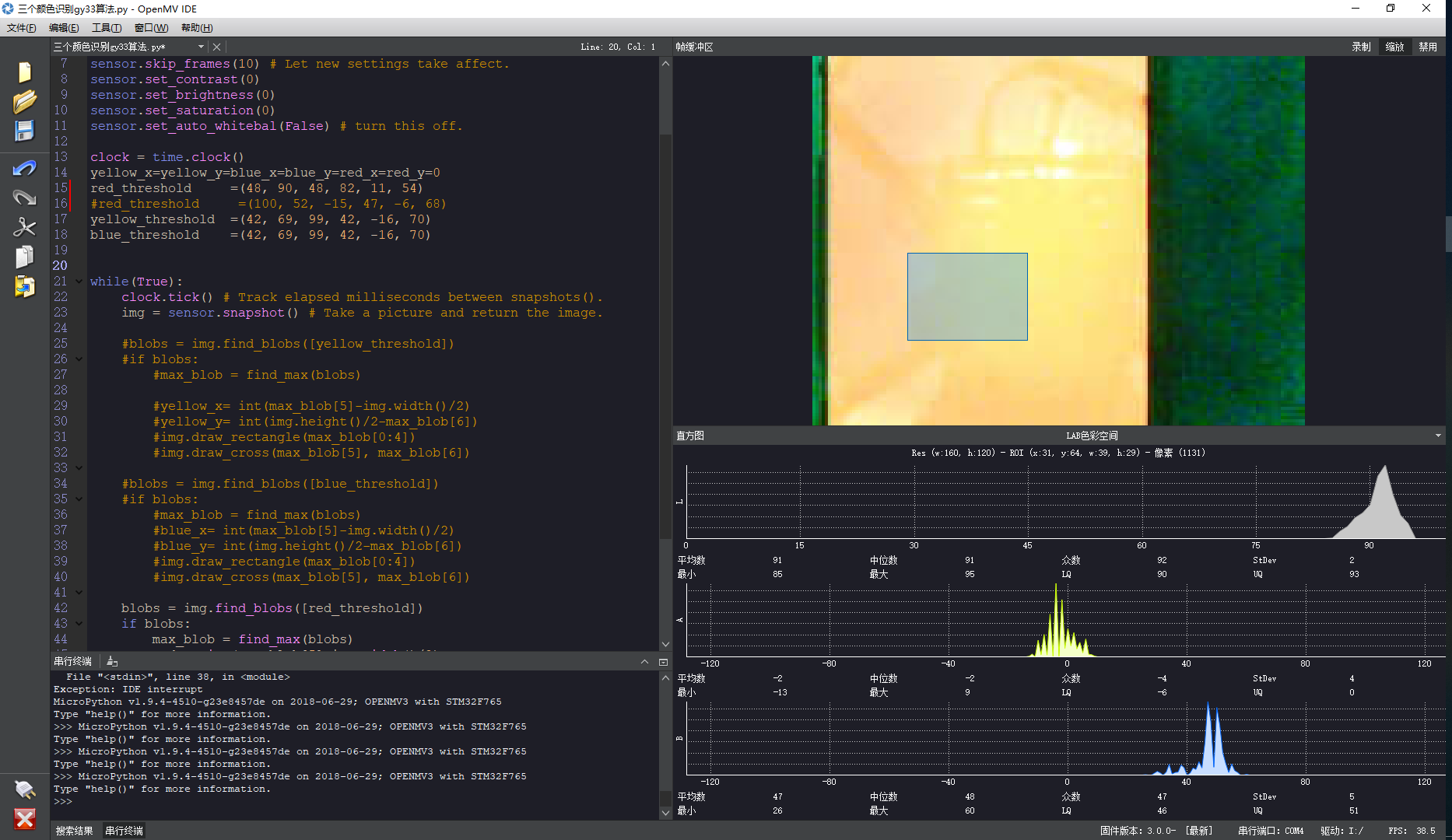
OPENMV颜色识别时在关闭白平衡的情况下受环境影响导致无法识别发布在 OpenMV Cam
用OPENMV写的一个简单的追踪颜色的程序,关闭了白平衡,还看了手册设置了固定的亮度对比度何饱和度,尝试过关闭自动增益但是颜色识别受环境影响,主要体现在初始化的时候,一开始我用手堵住镜头,和一开始对着亮光的地方,完成初始化后,同种颜色显示的差异很大,导致无法追踪,如下图所示,我是安装在无人机上的,无人机上电后在地面完成初始化,飞到空中以后,识别的颜色就会出错,想问下还有没有对摄像头初始化的函数调整办法解决这个问题,或者有没有什么算法能容纳各种环境下的同种颜色。
import sensor, image, time from pyb import UART sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.RGB565) # use RGB565. sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed. sensor.skip_frames(10) # Let new settings take affect. sensor.set_contrast(0) sensor.set_brightness(0) sensor.set_saturation(0) sensor.set_auto_whitebal(False) # turn this off. clock = time.clock() yellow_x=yellow_y=blue_x=blue_y=red_x=red_y=0 red_threshold =(48, 90, 48, 82, 11, 54) #red_threshold =(100, 52, -15, 47, -6, 68) yellow_threshold =(42, 69, 99, 42, -16, 70) blue_threshold =(42, 69, 99, 42, -16, 70)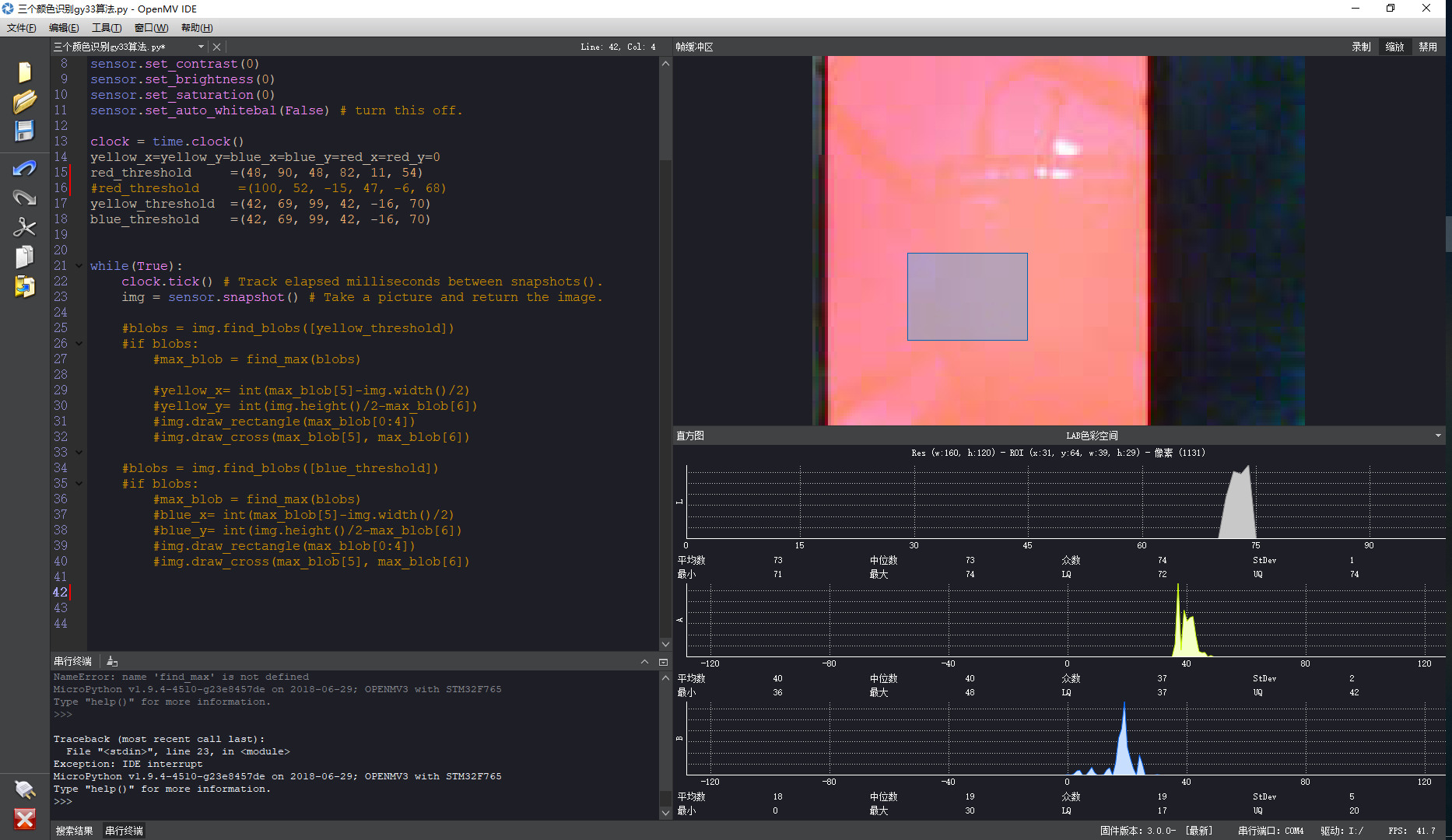
 请在这里粘贴代码
请在这里粘贴代码