# Selective Search Example
import sensor, image, time
from random import randint
sensor.reset() # Reset and initialize the sensor.
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
sensor.skip_frames(time = 2000) # Wait for settings take effect.
sensor.set_auto_gain(False)
sensor.set_auto_exposure(False, exposure_us=10000)
clock = time.clock() # Create a clock object to track the FPS.
while(True):
clock.tick() # Update the FPS clock.
img = sensor.snapshot() # Take a picture and return the image.
rois = img.selective_search(threshold = 200, size = 20, a1=0.5, a2=1.0, a3=1.0)
for r in rois:
img.draw_rectangle(r, color=(255, 0, 0))
#img.draw_rectangle(r, color=(randint(100, 255), randint(100, 255), randint(100, 255)))
print(clock.fps())
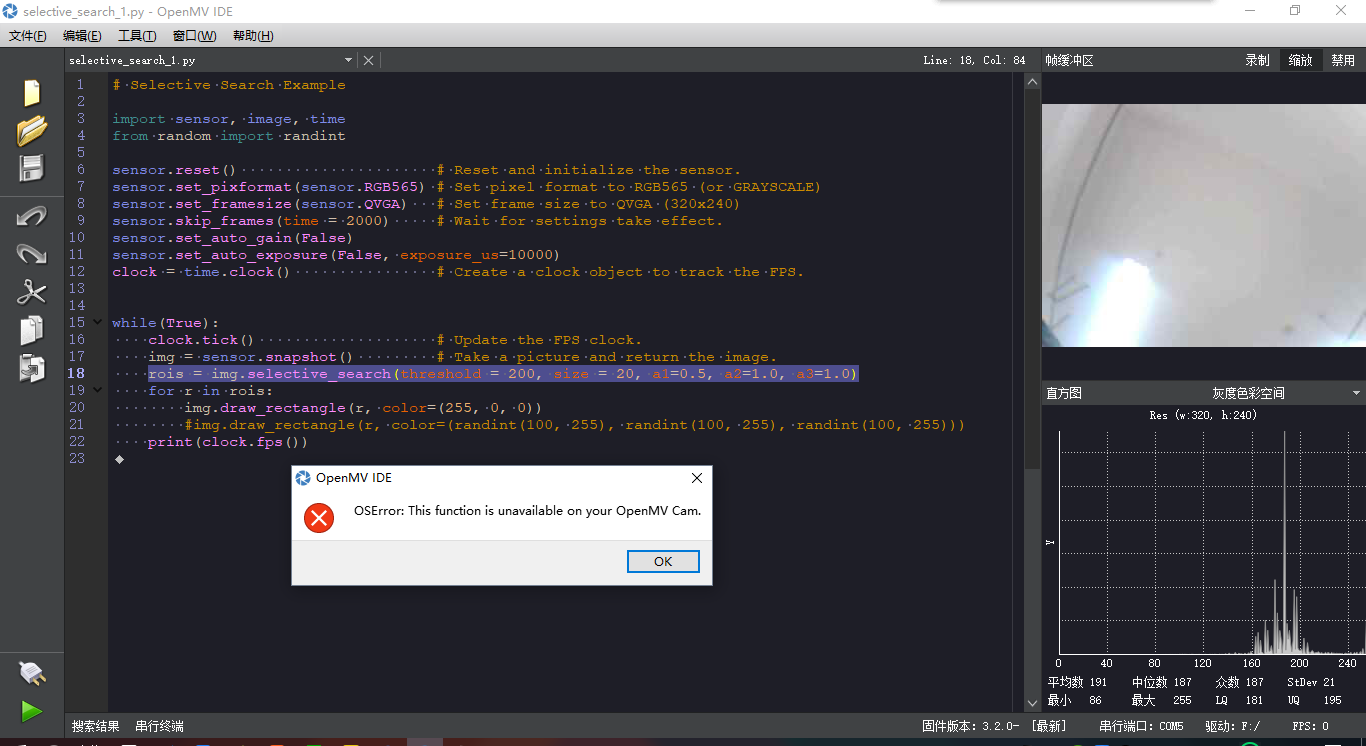
这个例程有人能用吗?是不是不支持openmv3?