报错:OSError:The maximum supported resolution for find_apriltags() is <64k pixels.
为了增加识别距离,提高了识别率
# MAVLink AprilTags Landing Target Script.
#
# This script sends out AprilTag detections using the MAVLink protocol to
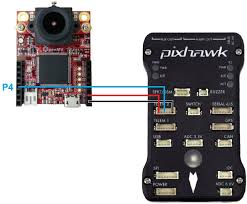
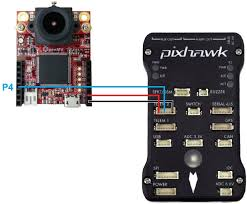
# an ArduPilot/PixHawk controller for precision landing using your OpenMV Cam.
#
# P4 = TXD
import image, math, pyb, sensor, struct, time
import time, pyb
led1 = pyb.LED(1) # Red LED = 1, Green LED = 2, Blue LED = 3, IR LEDs = 4.
led2 = pyb.LED(2)
led3 = pyb.LED(3)
# Parameters #################################################################
uart_baudrate = 115200
MAV_system_id = 1
MAV_component_id = 0x54
MAX_DISTANCE_SENSOR_enable = True
lens_mm = 2.8 # Standard Lens.
lens_to_camera_mm = 22 # Standard Lens.
sensor_w_mm = 3.984 # For OV7725 sensor - see datasheet.
sensor_h_mm = 2.952 # For OV7725 sensor - see datasheet.
# Only tags with a tag ID in the dictionary below will be accepted by this
# code. You may add as many tag IDs to the below dictionary as you want...
# For each tag ID you need to provide then length of the black tag border
# in mm. Any side of the tag black border square will work.
valid_tag_ids = {
0 : 165, # 8.5" x 11" tag black border size in mm
1 : 165, # 8.5" x 11" tag black border size in mm
2 : 165, # 8.5" x 11" tag black border size in mm
}
##############################################################################
# Camera Setup
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000)
x_res = 320 # QQVGA
y_res = 240 # QQVGA
f_x = (lens_mm / sensor_w_mm) * x_res
f_y = (lens_mm / sensor_h_mm) * y_res
c_x = x_res / 2
c_y = y_res / 2
h_fov = 2 * math.atan((sensor_w_mm / 2) / lens_mm)
v_fov = 2 * math.atan((sensor_h_mm / 2) / lens_mm)
def z_to_mm(z_translation, tag_size): # z_translation is in decimeters...
return (((z_translation * 100) * tag_size) / 165) - lens_to_camera_mm
# Link Setup
uart = pyb.UART(3, uart_baudrate, timeout_char = 1000)
# Helper Stuff
packet_sequence = 0
def checksum(data, extra): # https://github.com/mavlink/c_library_v1/blob/master/checksum.h
output = 0xFFFF
for i in range(len(data)):
tmp = data[i] ^ (output & 0xFF)
tmp = (tmp ^ (tmp << 4)) & 0xFF
output = ((output >> 8) ^ (tmp << 8) ^ (tmp << 3) ^ (tmp >> 4)) & 0xFFFF
tmp = extra ^ (output & 0xFF)
tmp = (tmp ^ (tmp << 4)) & 0xFF
output = ((output >> 8) ^ (tmp << 8) ^ (tmp << 3) ^ (tmp >> 4)) & 0xFFFF
return output
MAV_DISTANCE_SENSOR_message_id = 132
MAV_DISTANCE_SENSOR_min_distance = 1 # in cm
MAV_DISTANCE_SENSOR_max_distance = 10000 # in cm
MAV_DISTANCE_SENSOR_type = 0 # MAV_DISTANCE_SENSOR_LASER
MAV_DISTANCE_SENSOR_id = 0 # unused
MAV_DISTANCE_SENSOR_orientation = 25 # MAV_SENSOR_ROTATION_PITCH_270
MAV_DISTANCE_SENSOR_covariance = 0 # unused
MAV_DISTANCE_SENSOR_extra_crc = 85
# http://mavlink.org/messages/common#DISTANCE_SENSOR
# https://github.com/mavlink/c_library_v1/blob/master/common/mavlink_msg_distance_sensor.h
def send_distance_sensor_packet(tag, tag_size):
global packet_sequence
temp = struct.pack("<lhhhbbbb",
0,
MAV_DISTANCE_SENSOR_min_distance,
MAV_DISTANCE_SENSOR_max_distance,
min(max(int(z_to_mm(tag.z_translation(), tag_size) / 10), MAV_DISTANCE_SENSOR_min_distance), MAV_DISTANCE_SENSOR_max_distance),
MAV_DISTANCE_SENSOR_type,
MAV_DISTANCE_SENSOR_id,
MAV_DISTANCE_SENSOR_orientation,
MAV_DISTANCE_SENSOR_covariance)
temp = struct.pack("<bbbbb14s",
14,
packet_sequence & 0xFF,
MAV_system_id,
MAV_component_id,
MAV_DISTANCE_SENSOR_message_id,
temp)
temp = struct.pack("<b19sh",
0xFE,
temp,
checksum(temp, MAV_DISTANCE_SENSOR_extra_crc))
packet_sequence += 1
uart.write(temp)
MAV_LANDING_TARGET_message_id = 149
MAV_LANDING_TARGET_min_distance = 1/100 # in meters
MAV_LANDING_TARGET_max_distance = 10000/100 # in meters
MAV_LANDING_TARGET_frame = 8 # MAV_FRAME_BODY_NED
MAV_LANDING_TARGET_extra_crc = 200
# http://mavlink.org/messages/common#LANDING_TARGET
# https://github.com/mavlink/c_library_v1/blob/master/common/mavlink_msg_landing_target.h
def send_landing_target_packet(tag, w, h, tag_size):
global packet_sequence
temp = struct.pack("<qfffffbb",
0,
((tag.cx() / w) - 0.5) * h_fov,
((tag.cy() / h) - 0.5) * v_fov,
min(max(z_to_mm(tag.z_translation(), tag_size) / 1000, MAV_LANDING_TARGET_min_distance), MAV_LANDING_TARGET_max_distance),
0.0,
0.0,
0,
MAV_LANDING_TARGET_frame)
temp = struct.pack("<bbbbb30s",
30,
packet_sequence & 0xFF,
MAV_system_id,
MAV_component_id,
MAV_LANDING_TARGET_message_id,
temp)
temp = struct.pack("<b35sh",
0xFE,
temp,
checksum(temp, MAV_LANDING_TARGET_extra_crc))
packet_sequence += 1
uart.write(temp)
# Main Loop
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot()
tags = sorted(img.find_apriltags(fx=f_x, fy=f_y, cx=c_x, cy=c_y), key = lambda x: x.w() * x.h(), reverse = True)
if tags and (tags[0].id() in valid_tag_ids):
if MAX_DISTANCE_SENSOR_enable: send_distance_sensor_packet(tags[0], valid_tag_ids[tags[0].id()])
send_landing_target_packet(tags[0], img.width(), img.height(), valid_tag_ids[tags[0].id()])
img.draw_rectangle(tags[0].rect())
img.draw_cross(tags[0].cx(), tags[0].cy())
print("Distance %f mm - FPS %f" % (z_to_mm(tags[0].z_translation(), valid_tag_ids[tags[0].id()]), clock.fps()))
led1.on()
led2.on()
time.sleep(100)
led1.off()
led2.off()
else:
print("FPS %f" % clock.fps())
led3.on()
led1.on()
time.sleep(100)
led3.off()
led1.off()
请在这里粘贴代码