@yuan 请问如何进行有筛选的模板匹配?
Z
zgwu
@zgwu
0
声望
18
楼层
3320
资料浏览
0
粉丝
0
关注
zgwu 发布的帖子
-
RE: 逆透视变换发布在 OpenMV Cam
@kidswong999 以一定的角度看桌子上的一本书,然后将摄像头识别到梯形重新拉成矩形。是应该对sensor.snapshot()函数返回回来的图像,进行拉伸变换吗,还是应该如何操作。看了不少资料,还是没有头绪,还请指教

-
RE: 分区域扫描图像发布在 OpenMV Cam
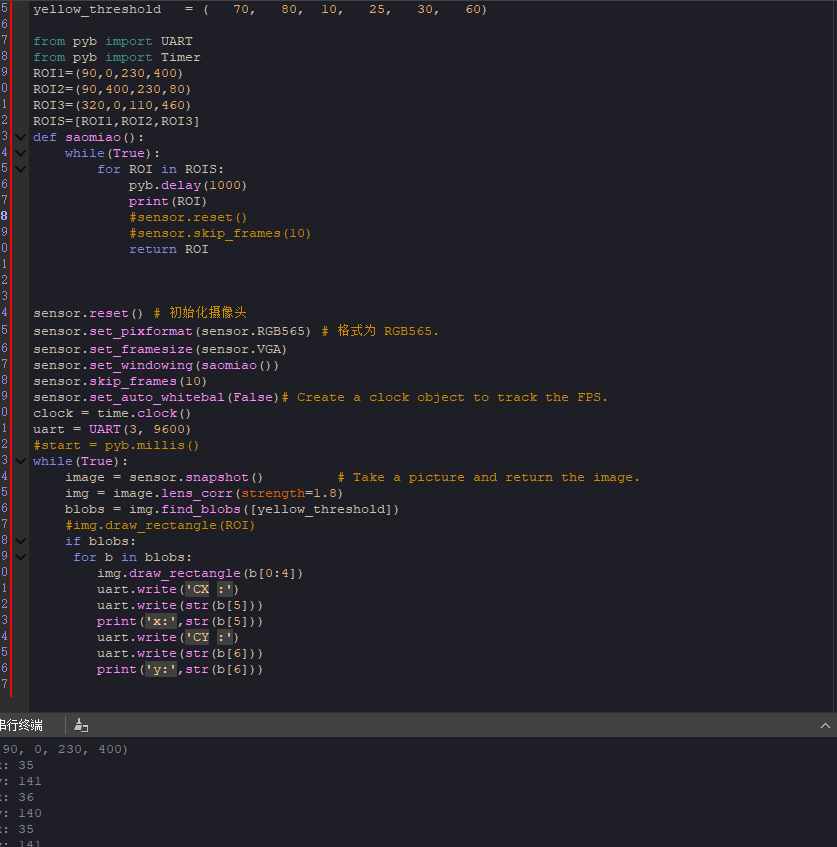
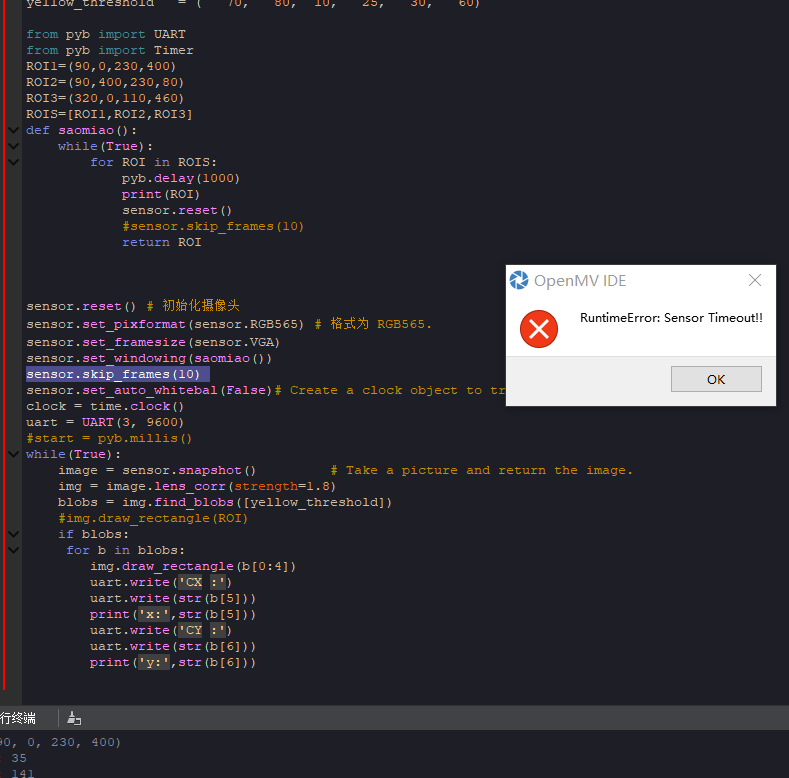
如果不在循环里进行初始化的话,saomiao函数只能给set_windows返回第一个值。如果加初始化的话,会出现sensor timeout 的错误。有人知道怎么解决吗?求指教
-
分区域扫描图像发布在 OpenMV Cam
想用VGA格式读一幅图像,但是内存不够,所以想把一幅图片分开扫描,但遇到很多问题,求指教
yellow_threshold = ( 70, 80, 10, 25, 30, 60) from pyb import UART from pyb import Timer ROI1=(90,0,230,400) ROI2=(90,400,230,80) ROI3=(320,0,110,460) ROIS=[ROI1,ROI2,ROI3] def saomiao(): while(True): for ROI in ROIS: pyb.delay(1000) sensor.reset() #sensor.skip_frames(10) return ROI sensor.reset() # 初始化摄像头 sensor.set_pixformat(sensor.RGB565) # 格式为 RGB565. sensor.set_framesize(sensor.VGA) sensor.set_windowing(saomiao()) sensor.skip_frames(1000) sensor.set_auto_whitebal(False)# Create a clock object to track the FPS. clock = time.clock() uart = UART(3, 9600) #start = pyb.millis() while(True): image = sensor.snapshot() # Take a picture and return the image. img = image.lens_corr(strength=1.8) blobs = img.find_blobs([yellow_threshold]) #img.draw_rectangle(ROI) if blobs: for b in blobs: img.draw_rectangle(b[0:4]) uart.write('CX :') uart.write(str(b[5])) print('x:',str(b[5])) uart.write('CY :') uart.write(str(b[6])) print('y:',str(b[6])) -
RE: 为什么好多函数例如find_blobs等都不支持VGA格式的图像,如果想在VGA格式下使用这些函数有什么方法吗发布在 OpenMV Cam
@kidswong999 好吧,把set_windowing()函数放到skip_frames()函数前面就可以了,如果把set_windowing()放到最后就会出现我的那种情况,报格式错误。这有是什么原因呢?