通过自己摸索,已自行解决了!
wujingyu
@wujingyu
0
声望
16
楼层
1007
资料浏览
0
粉丝
0
关注
wujingyu 发布的帖子
-
用串口读取JSON数据,解析时报错,请问是什么原因?发布在 OpenMV Cam
用串口读取:{'a':'1111','b':'2222','c':'3333','d':'4444'} 时,JSON解析时报错,请问是什么原因?
程序如下:import time, pyb from pyb import UART import ujson led = pyb.LED(3) uart = UART(1, 9600) while(True): if(uart.any()): # 是否有数据 time.sleep(200) led.off() d = uart.read() da = str(d, "utf-8") # bytes转str dd = eval((da)) jsObj = ujson.loads(dd) print(type(jsObj)) for key in jsObj.keys(): print('key: %s value: %s' % (key,jsObj.get(key))) else: led.on() time.sleep(1000)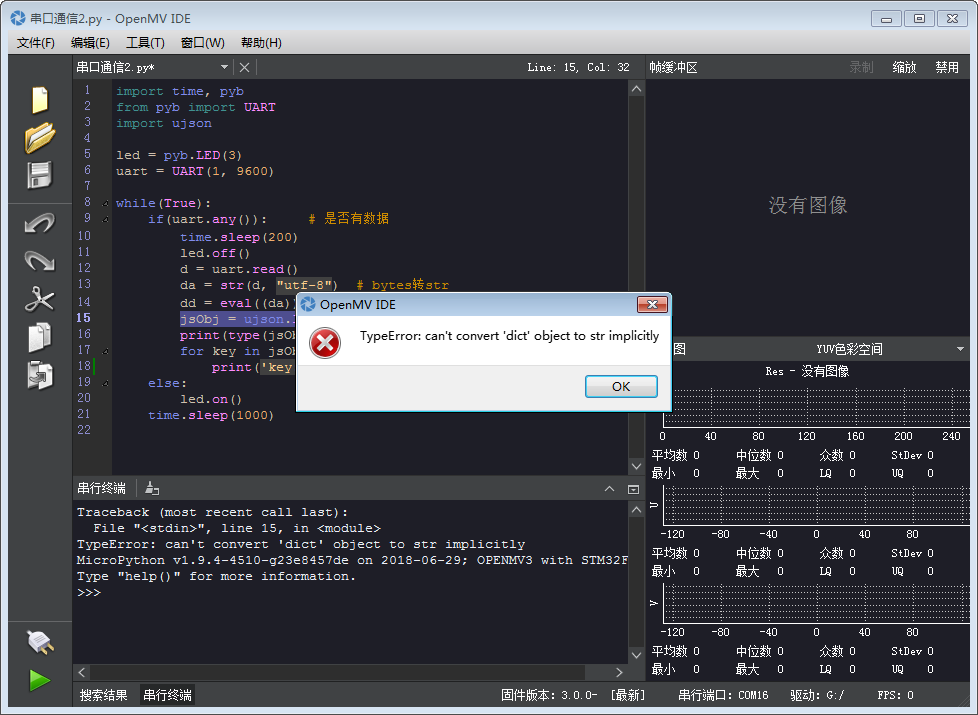
Traceback (most recent call last):
File "", line 15, in
TypeError: can't convert 'dict' object to str implicitly
MicroPython v1.9.4-4510-g23e8457de on 2018-06-29; OPENMV3 with STM32F765
Type "help()" for more information.哪位大师能给出解决方案,谢谢!
-
RE: OpenMV的Servo.angle([angle, time=0])问题发布在 OpenMV Cam
没人回答,就自问自答了!
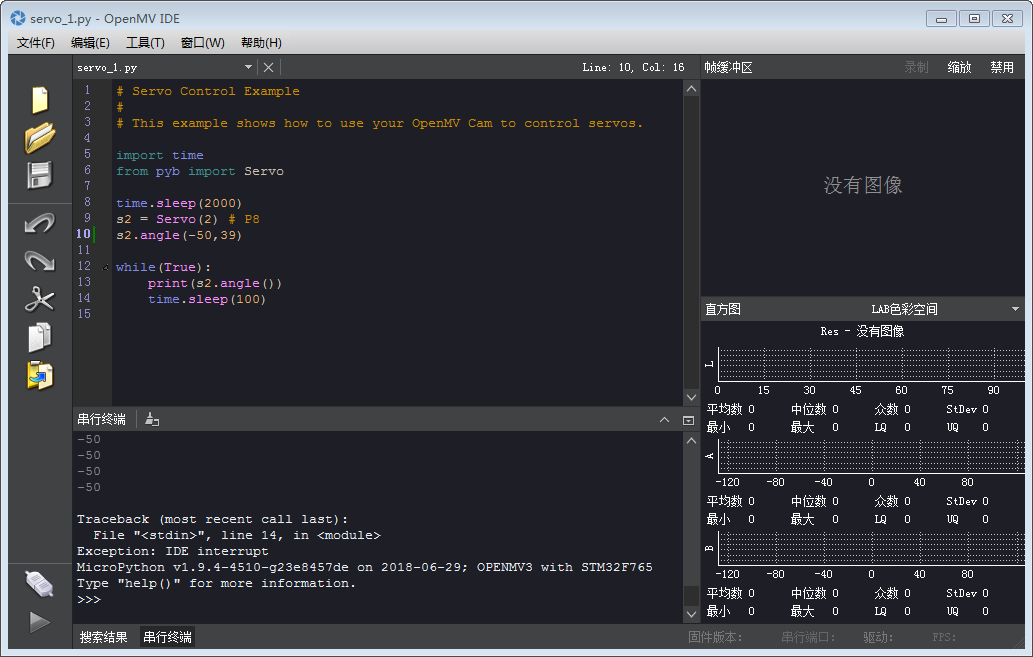
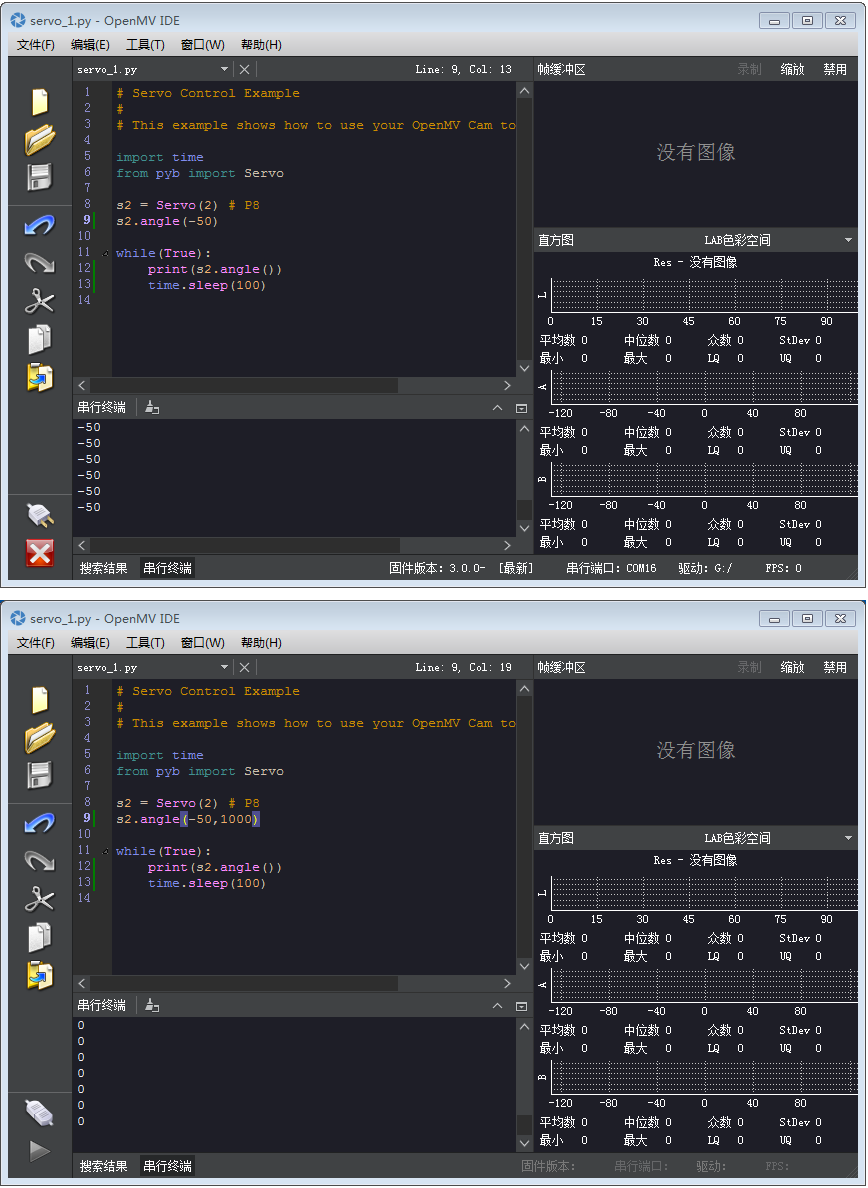
最新测试结果,但time参数值小于等于39时,舵机转角控制正常,当time大于39时,此转角控制就不正常了。
-
OpenMV的Servo.angle([angle, time=0])问题发布在 OpenMV Cam
我用Servo.angle([angle, time=0])发现一个问题,当不设置time参数时(也就是默认值0),程序运行正常,当我使用time参数时,伺服电机的角度无论设置到多少,都回到 0 了,不知是什么原因,请大师指教,谢谢!
程序如下:
import time
from pyb import Servos2 = Servo(2) # P8
s2.angle(-50,1000)while(True):
print(s2.angle())
time.sleep(100)两种运行结果如下图:
-
OpenMV的pyb.USB_VCP().isconnected()状态疑问发布在 OpenMV Cam
OpenMV的pyb.USB_VCP().isconnected()在IDE连机测试与脱机运行用串口助手测试时的状态不同,测试如下图:
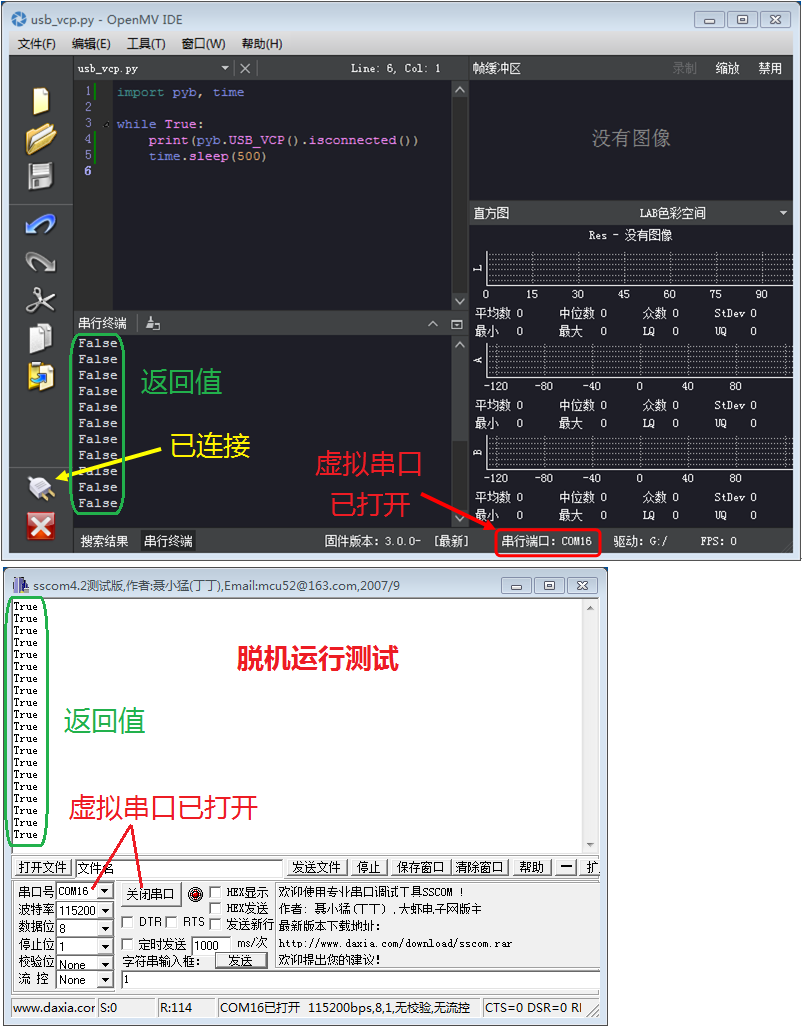
这个不是我的模块问题,因为已有几个人的测试结果与我的相同。
希望回帖的能真实测试后再回帖!
-
RE: OpenMV IDE的串口对应pyb板串口号或引脚是多少?发布在 OpenMV Cam
@kidswong999 我将你的代码测试的结果用图片发上来,你看看。
1、你的原代码点击连接、运行后,红LED不亮,如下图:
2、我将你的程序on、off对调后运行结果如下图:
请问是什么问题?是我的模块有问题吗? -
RE: OpenMV IDE的串口对应pyb板串口号或引脚是多少?发布在 OpenMV Cam
@kidswong999 这个我不用看,脱机运行,我测试程序也说明了可以,没有问题的呀,我是说OpenMV IDE里如何操作,如何看,你不脱机,用IDE运行试试你的程序,看看效果如何?