我先用串口帧格式与单片机通讯,在openmv发送数据上出错,为什么说不能把浮点型转整形?我用了int()也不行?
-
#THRESHOLD =(0, 23, -12, 5, -5, 13) THRESHOLD_day=(0, 30, -47, 20, -28, 19) import sensor, image, time,math,pyb from pyb import UART,Pin,Timer from pyb import LED from pid import PID output_str='' uart = UART(3,9600) sensor.reset() sensor.set_vflip(True) sensor.set_hmirror(True) sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) sensor.set_windowing((0,60,120,60)) sensor.skip_frames(time = 2000) clock = time.clock() LED(1).on() LED(2).on() LED(3).on() roi_X=[30,0,30,30] roi_stra=[50,0,30,30] rho_pid = PID(p=0.7, i=0) theta_pid = PID(p=0.3, i=0.5,d=0.1) while(True): img = sensor.snapshot() img.draw_rectangle(roi_X, color = (255, 0, 0), thickness = 2, fill = False) img.draw_rectangle(roi_stra, color = (255, 0, 0), thickness = 2, fill = False) blobs = img.find_blobs([THRESHOLD_day], roi=roi_X,x_stride=1, y_stride=1,pixels_threshold=10) for blob in blobs: img.draw_rectangle(blob.rect()) img.draw_cross(blob.cx(), blob.cy()) if blob: blobsss = img.find_blobs([THRESHOLD_day],roi=roi_stra,x_stride=1, y_stride=1,pixels_threshold=10) for blob in blobs: img.draw_rectangle(blob.rect()) img.draw_cross(blob.cx(), blob.cy()) if blob: print('go!') output_str =bytearray([0x2C,0x12,128,128,0x5B]) #output_str='&0%d%d*' % (300, 300) uart.write(output_str) print(output_str) pyb.delay(200) img = sensor.snapshot().binary([THRESHOLD_day]) line1 = img.get_regression([(100,100)], robust = True) if (line1): rho_err = abs(line1.rho())-img.width()/2 if line1.theta()>90: theta_err = line1.theta()-180 else: theta_err = line1.theta() img.draw_line(line1.line(), color = 127) if line1.magnitude()>8: rho_output = rho_pid.get_pid(rho_err,1) theta_output = theta_pid.get_pid(theta_err,1) output = rho_output+theta_output output1=128-output output2=128+output int(output1) int(output2) output_str =bytearray([0x2C,0x12,output1,output2,0x5B]) #output_str='&0%d%d*' % (300-output, 300+output) uart.write(output_str) print(output_str) else: output_str =bytearray([0x2C,0x12,0,128,0x5B]) #output_str='&0000300*' uart.write(output_str) print(output_str) pass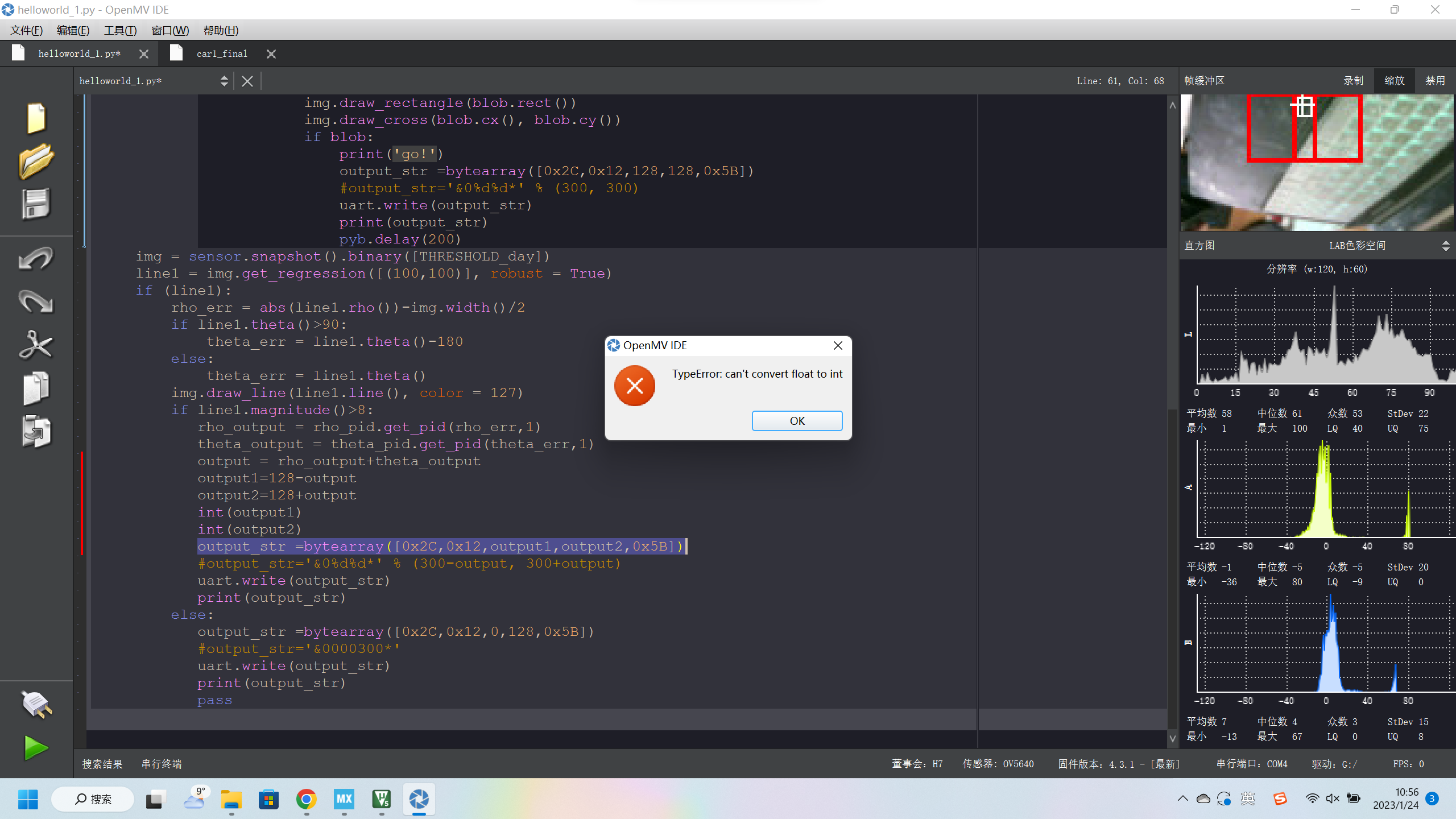
-
output1=128-output output2=128+output int(output1) int(output2) output_str =bytearray([0x2C,0x12,output1,output2,0x5B])改成
output1=int(128-output) output2=int(128+output) output_str =bytearray([0x2C,0x12,output1,output2,0x5B])