我这里该怎么判断这个坐标呀?他这个tag.z_translation()是什么类型的数据?我这样写为什么输出不了高电平?
-
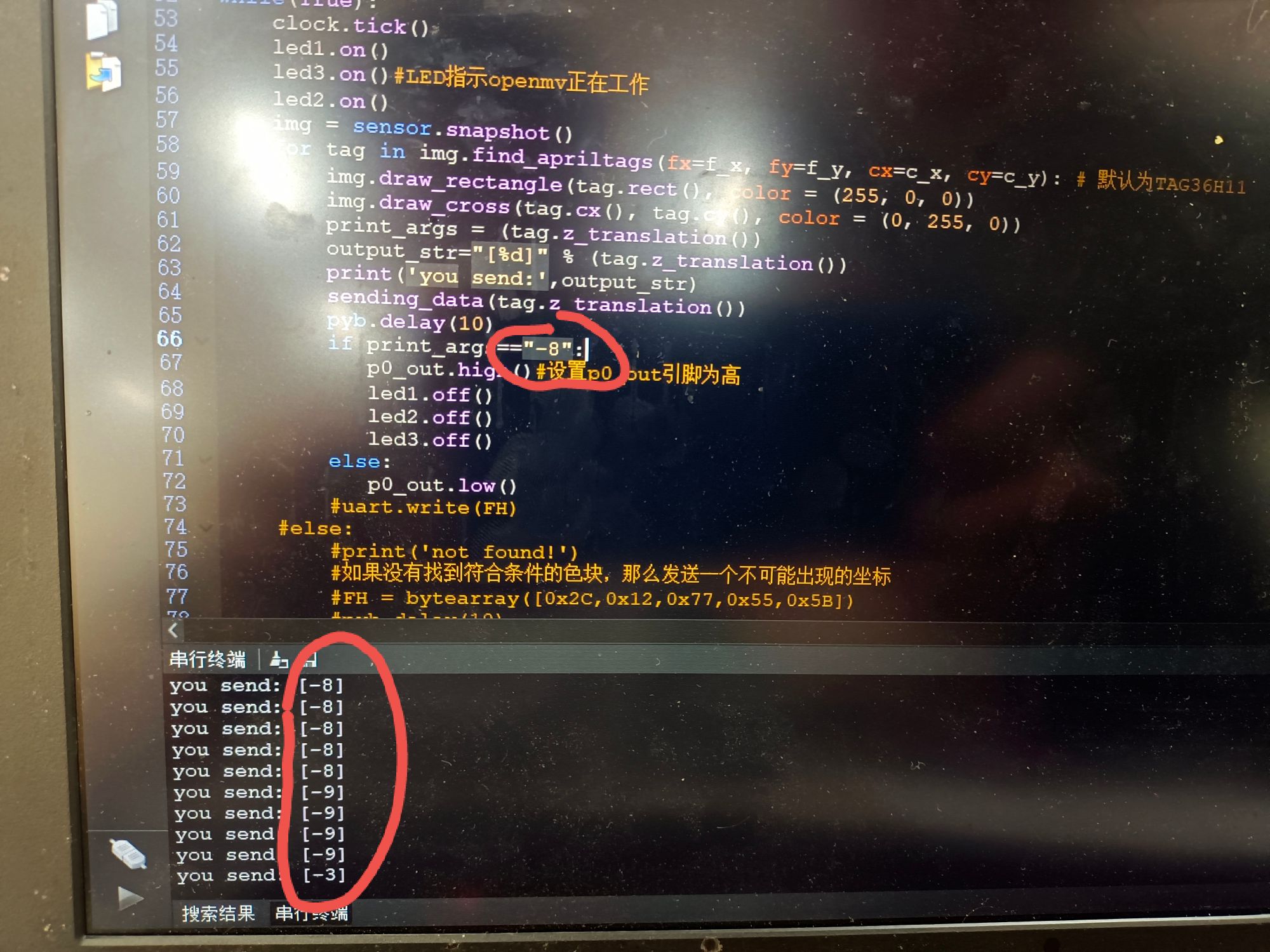
# AprilTags Example # # This example shows the power of the OpenMV Cam to detect April Tags # on the OpenMV Cam M7. The M4 versions cannot detect April Tags. import sensor, image, time, math,pyb import ustruct from pyb import UART from pyb import Pin sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQVGA) # we run out of memory if the resolution is much bigger... sensor.skip_frames(30) sensor.set_auto_gain(False) # must turn this off to prevent image washout... sensor.set_auto_whitebal(False) # must turn this off to prevent image washout... clock = time.clock() led3 = pyb.LED(3) # Red LED = 1, Green LED = 2, Blue LED = 3, IR LEDs = 4. led2 = pyb.LED(2) led1 = pyb.LED(1) p0_out = Pin('P0', Pin.OUT_PP)#设置p0为输出引脚 # 注意!与find_qrcodes不同,find_apriltags 不需要软件矫正畸变就可以工作。 # 注意,输出的姿态的单位是弧度,可以转换成角度,但是位置的单位是和你的大小有关,需要等比例换算 # f_x 是x的像素为单位的焦距。对于标准的OpenMV,应该等于2.8/3.984*656,这个值是用毫米为单位的焦距除以x方向的感光元件的长度,乘以x方向的感光元件的像素(OV7725) # f_y 是y的像素为单位的焦距。对于标准的OpenMV,应该等于2.8/2.952*488,这个值是用毫米为单位的焦距除以y方向的感光元件的长度,乘以y方向的感光元件的像素(OV7725) # c_x 是图像的x中心位置 # c_y 是图像的y中心位置 uart = UART(3, 115200)#初始化串口号及其波特率 uart.init(115200,bits=8,parity=None,stop=1) f_x = (2.8 / 3.984) * 160 # 默认值 f_y = (2.8 / 2.952) * 120 # 默认值 c_x = 160 * 0.5 # 默认值(image.w * 0.5) c_y = 120 * 0.5 # 默认值(image.h * 0.5) def sending_data(cx): global uart; #frame=[0x2C,18,cx%0xff,int(cx/0xff),cy%0xff,int(cy/0xff),0x5B]; #data = bytearray(frame) data = ustruct.pack("<bbhb", #格式为俩个字符俩个短整型(2字节) 0x2C, #帧头1 0x12, #帧头2 int(cx), # up sample by 4 #数据1 # up sample by 4 #数据2 0x5B) uart.write(data); #必须要传入一字节的数组,这个函数似乎不能发送单个字节,必须得一次发送多个字节 def degrees(radians): return (180 * radians) / math.pi while(True): clock.tick() led1.on() led3.on()#LED指示openmv正在工作 led2.on() img = sensor.snapshot() for tag in img.find_apriltags(fx=f_x, fy=f_y, cx=c_x, cy=c_y): # 默认为TAG36H11 img.draw_rectangle(tag.rect(), color = (255, 0, 0)) img.draw_cross(tag.cx(), tag.cy(), color = (0, 255, 0)) print_args = (tag.z_translation()) output_str="[%d]" % (tag.z_translation()) print('you send:',output_str) sending_data(tag.z_translation()) led1.off() led2.off() led3.off() pyb.delay(10) if print_args=="-8": p0_out.high()#设置p0_out引脚为高 else: p0_out.low() uart.write(FH) else: print('not found!') #如果没有找到符合条件的色块,那么发送一个不可能出现的坐标 #FH = bytearray([0x2C,0x12,0x77,0x55,0x5B]) pyb.delay(10) #uart.write(FH) # 位置的单位是未知的,旋转的单位是角度
-
你应该写
if tag.z_translation() > -8: p0_out.high() else: p0_out.low()