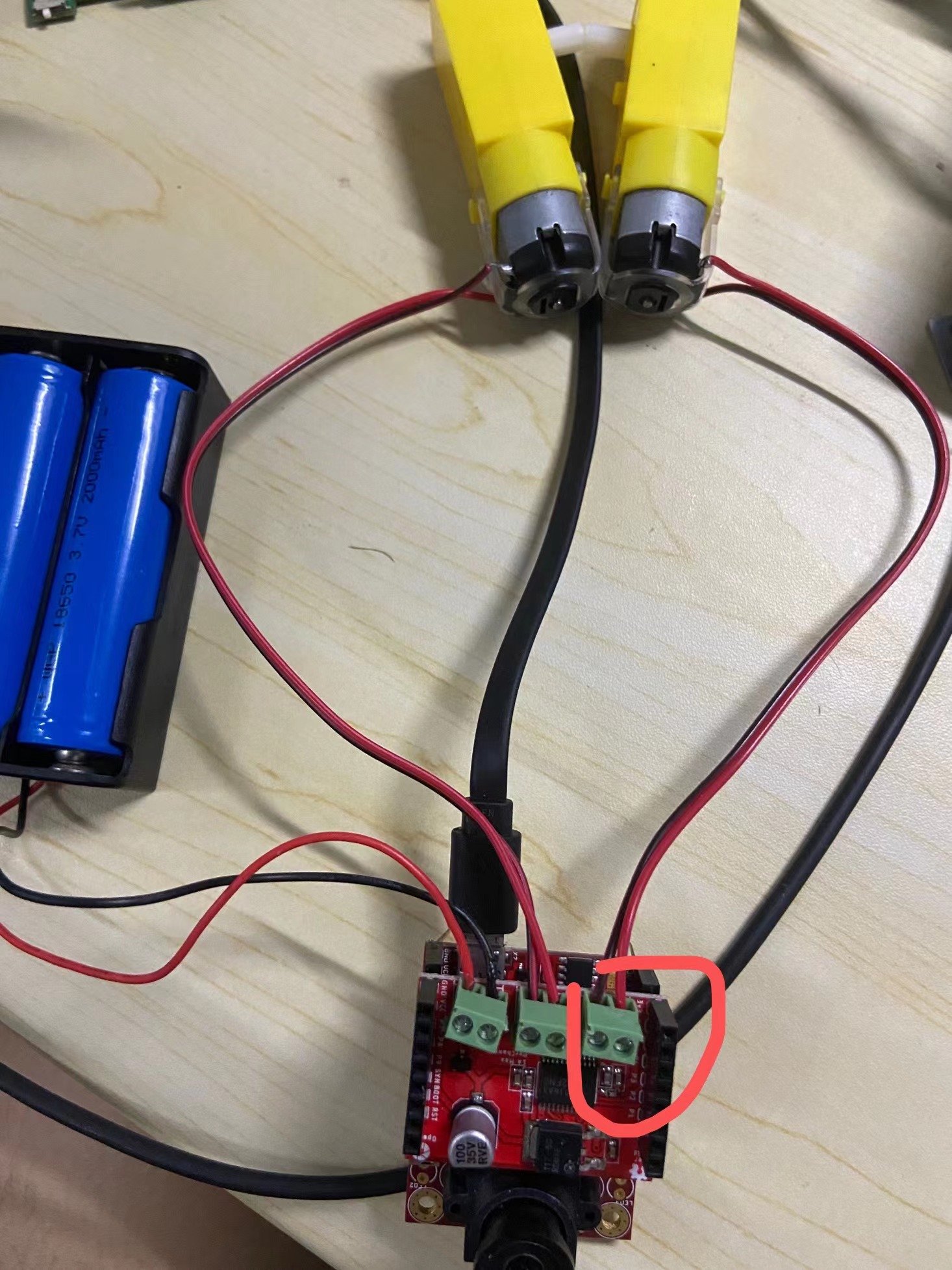
舵机拓展版接上电连上这两个电机,使用示例程序测试只有中间的电机正常动红色圈的那边电机没反应,然后电机对调重复测试结果相同
-
-
用的什么代码。发一下具体的代码文本。
-
# Motor Shield PWM Example # # This example shows off how to control the motor shield on your # OpenMV Cam. The motor shield is controlled by using the PYB module # which lets you do PWM to control the speed and set digital I/O pin # states. The motor shield needs 6 I/O pins for both motors. import pyb # These pins control our direction while the other PWN pins # below control the speed. The direction for each motor # is set by an H-Bridge where A0/1 are the two sides of # one H-Bridge driver. B0/1 are another H-Bridge. pinADir0 = pyb.Pin('P3', pyb.Pin.OUT_PP, pyb.Pin.PULL_NONE) pinADir1 = pyb.Pin('P2', pyb.Pin.OUT_PP, pyb.Pin.PULL_NONE) pinBDir0 = pyb.Pin('P1', pyb.Pin.OUT_PP, pyb.Pin.PULL_NONE) pinBDir1 = pyb.Pin('P0', pyb.Pin.OUT_PP, pyb.Pin.PULL_NONE) # Dir0/1 must be not equal to each other for forward or backwards # operation. If they are equal then that's a brake operation. # If they are not equal then the motor will spin one way other the # other depending on it's hookup and the value of dir 0. pinADir0.value(0) pinADir1.value(1) # Dir0/1 must be not equal to each other for forward or backwards # operation. If they are equal then that's a brake operation. # If they are not equal then the motor will spin one way other the # other depending on it's hookup and the value of dir 0. pinBDir0.value(0) pinBDir1.value(1) # Create a timer object running at 1KHz which which will power the # PWM output on our OpenMV Cam. Just needs to be created once. tim = pyb.Timer(4, freq=1000) # Use the timer object to create two PWM outputs on the OpenMV Cam. # These timers control the speed of the motors. You will be setting # the PWM percentage of these timers repeatedly in your loop. chA = tim.channel(1, pyb.Timer.PWM, pin=pyb.Pin("P7")) chB = tim.channel(2, pyb.Timer.PWM, pin=pyb.Pin("P8")) while (True): for i in range(100): pyb.delay(100) chA.pulse_width_percent(i) chB.pulse_width_percent(99-i) for i in range(100): pyb.delay(100) chA.pulse_width_percent(99-i) chB.pulse_width_percent(i)
-
# Motor Shield PWM Example # # This example shows off how to control the motor shield on your # OpenMV Cam. The motor shield is controlled by using the PYB module # which lets you do PWM to control the speed and set digital I/O pin # states. The motor shield needs 6 I/O pins for both motors. import pyb # These pins control our direction while the other PWN pins # below control the speed. The direction for each motor # is set by an H-Bridge where A0/1 are the two sides of # one H-Bridge driver. B0/1 are another H-Bridge. pinADir0 = pyb.Pin('P3', pyb.Pin.OUT_PP, pyb.Pin.PULL_NONE) pinADir1 = pyb.Pin('P2', pyb.Pin.OUT_PP, pyb.Pin.PULL_NONE) pinBDir0 = pyb.Pin('P1', pyb.Pin.OUT_PP, pyb.Pin.PULL_NONE) pinBDir1 = pyb.Pin('P0', pyb.Pin.OUT_PP, pyb.Pin.PULL_NONE) # Dir0/1 must be not equal to each other for forward or backwards # operation. If they are equal then that's a brake operation. # If they are not equal then the motor will spin one way other the # other depending on it's hookup and the value of dir 0. pinADir0.value(0) pinADir1.value(1) # Dir0/1 must be not equal to each other for forward or backwards # operation. If they are equal then that's a brake operation. # If they are not equal then the motor will spin one way other the # other depending on it's hookup and the value of dir 0. pinBDir0.value(0) pinBDir1.value(1) # Create a timer object running at 1KHz which which will power the # PWM output on our OpenMV Cam. Just needs to be created once. tim = pyb.Timer(4, freq=1000) # Use the timer object to create two PWM outputs on the OpenMV Cam. # These timers control the speed of the motors. You will be setting # the PWM percentage of these timers repeatedly in your loop. chA = tim.channel(1, pyb.Timer.PWM, pin=pyb.Pin("P7")) chB = tim.channel(2, pyb.Timer.PWM, pin=pyb.Pin("P8")) while (True): for i in range(100): pyb.delay(100) chA.pulse_width_percent(i) chB.pulse_width_percent(99-i) for i in range(100): pyb.delay(100) chA.pulse_width_percent(99-i) chB.pulse_width_percent(i)
-
估计是你OpenMV焊接的不对,联系售后检查维修。