Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you may not be able to execute some actions.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
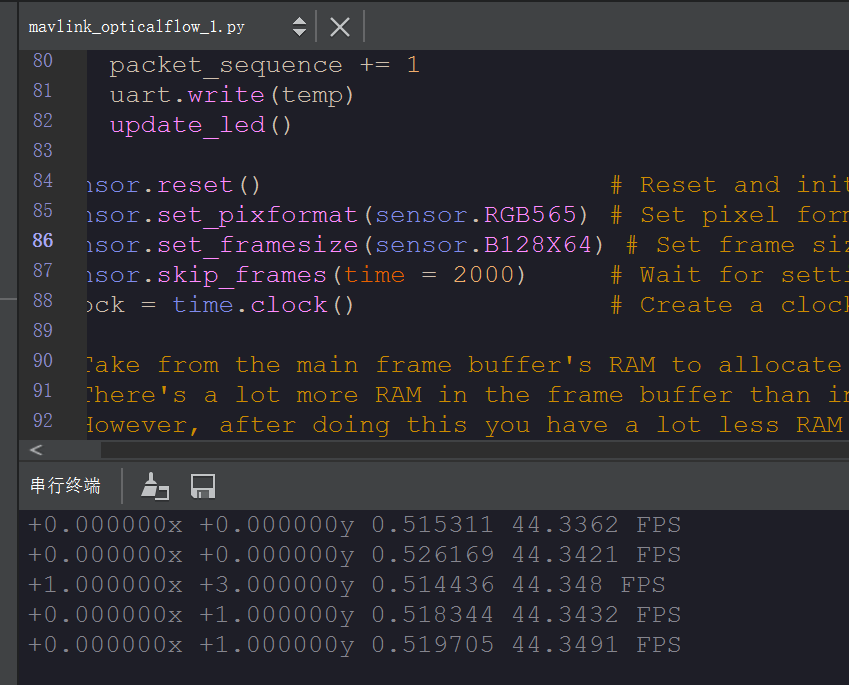
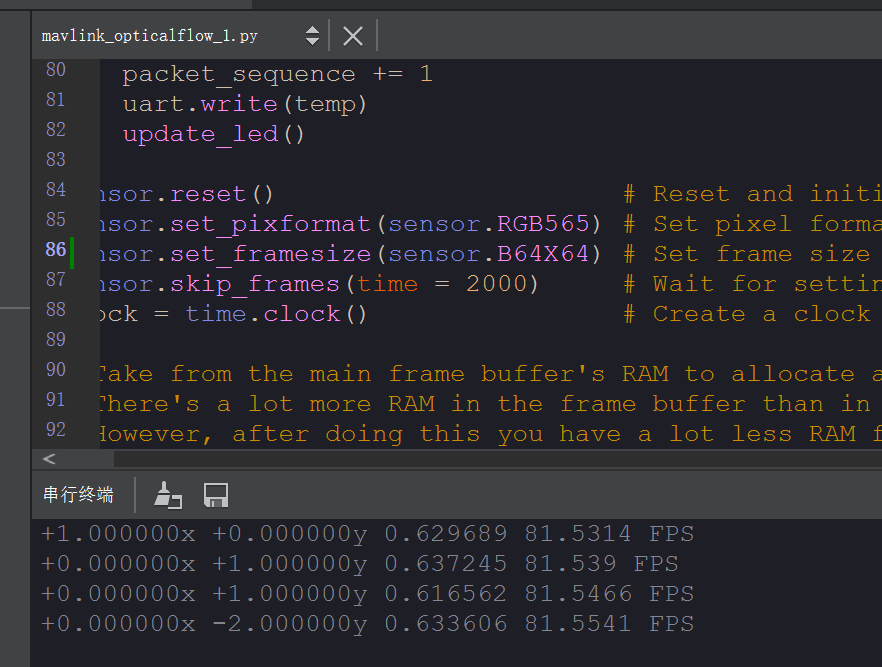
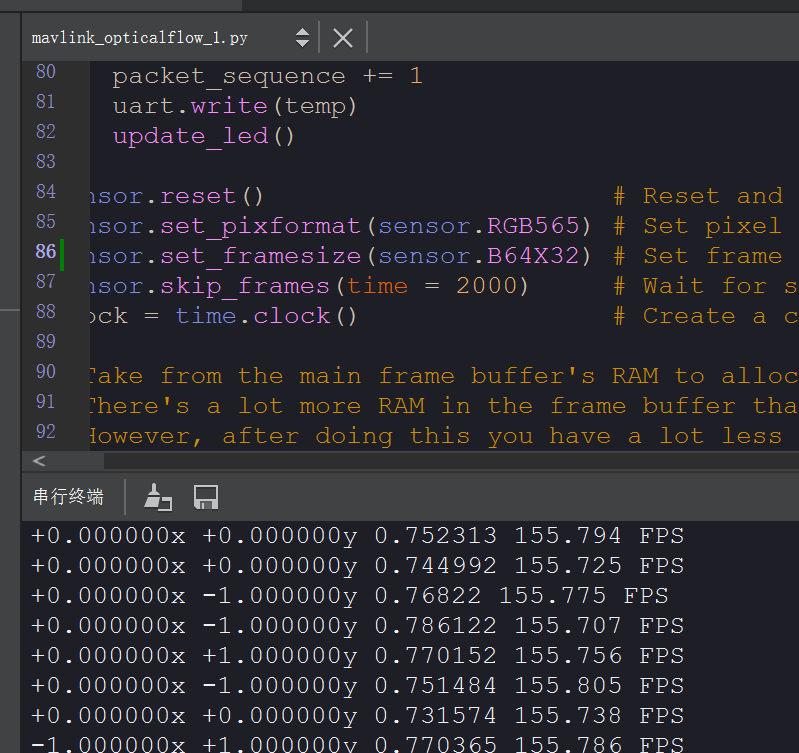
我使用STM32H743版本的openmv用作无人机的光流定位。 在测试光流教程,修改sensor.set_framesize(sensor.B64X64)中的参数,我分别设置为128X64,64X64,64X32。在同一固定位置和同一光照条件下,对比返回值中的response数据,发现64X32最高,64X64居中,128X64最差。这是为什么呢,不应该是参数设置越高,越准确吗?
我不知道,你可以看一下源码里response是怎么计算出来的。
https://github.com/openmv/openmv/blob/d5ad043c30de31d16f6c483a47ab2126a383b8ac/src/omv/imlib/phasecorrelation.c#L246