请问怎么让openmv在wifi图传的同时能够识别圆?
-
wifi扩展板已买,wifi图传以及识别圆的代码也在官网上找到了。怎么让openmv在脱机时两个程序都能运行呢?
-
效果就是能在wifi图传的画面上显示出识别的的圆,像官网视频教程那样用红圈标出。
-
https://book.openmv.cc/example/14-WiFi-Shield/mjpeg-streamer-ap.html
在frame = sensor.snapshot()下面添加find_circles函数和draw函数
-
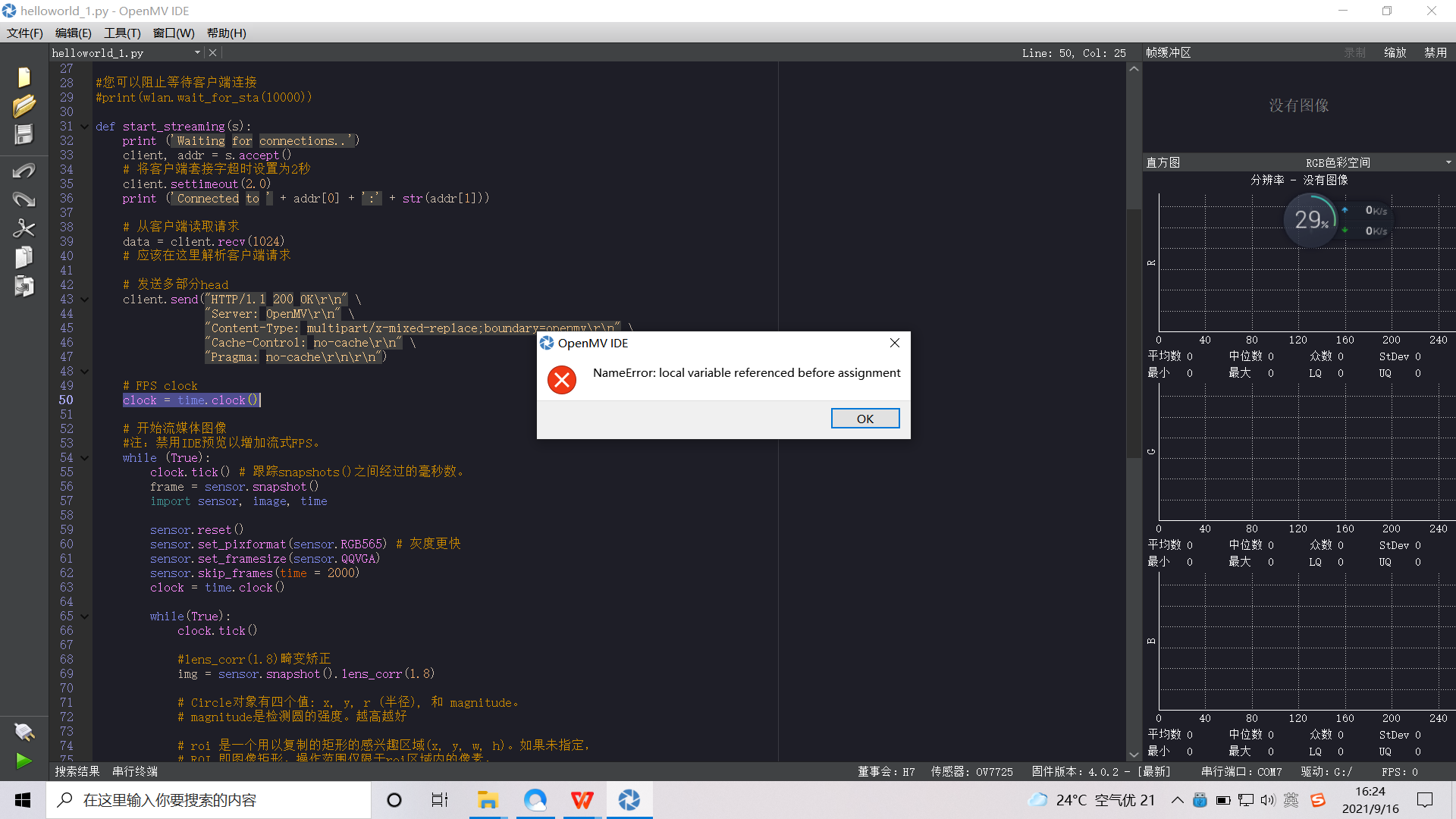
 只是将找圆的代码复制粘贴上去吗,我这么做了以后显示错误了,能讲讲具体怎么做吗?
-
如果涉及代码,需要报错提示与全部代码文本,请注意不要贴代码图片
-
你要看懂每一行代码的作用,不是简单复制。
-
@kidswong999 我现在换了一种办法,直接在你说的地方用import导入circle(从官网上手教程,例程解析里特征识别里面直接找到的find_circles,重命名circle.py文件保存在openmv里),现在的问题是它图传连不上openmv AP热点。我的python语言不太好,就是麻烦大佬能看看是哪里出问题了吗?可以的话大佬能给一个可行的程序吗?谢谢了
# MJPEG Streaming AP. # # 这个例子展示了如何在AccessPoint模式下进行MJPEG流式传输。 # Android上的Chrome,Firefox和MJpegViewer App已经过测试。 # 连接到OPENMV_AP并使用此URL:http://192.168.1.1:8080查看流。 import sensor, image, time, network, usocket, sys SSID ='OPENMV_AP' # Network SSID KEY ='1234567890' # wifi密码(必须为10字符) HOST = '' # 使用第一个可用的端口 PORT = 8080 # 任意非特权端口 # 重置传感器 sensor.reset() # 设置传感器设置 sensor.set_contrast(1) sensor.set_brightness(1) sensor.set_saturation(1) sensor.set_gainceiling(16) sensor.set_framesize(sensor.QQVGA) sensor.set_pixformat(sensor.RGB565) # 在AP模式下启动wlan模块。 wlan = network.WINC(mode=network.WINC.MODE_AP) wlan.start_ap(SSID, key=KEY, security=wlan.WEP, channel=2) #您可以阻止等待客户端连接 #print(wlan.wait_for_sta(10000)) def start_streaming(s): print ('Waiting for connections..') client, addr = s.accept() # 将客户端套接字超时设置为2秒 client.settimeout(2.0) print ('Connected to ' + addr[0] + ':' + str(addr[1])) # 从客户端读取请求 data = client.recv(1024) # 应该在这里解析客户端请求 # 发送多部分head client.send("HTTP/1.1 200 OK\r\n" \ "Server: OpenMV\r\n" \ "Content-Type: multipart/x-mixed-replace;boundary=openmv\r\n" \ "Cache-Control: no-cache\r\n" \ "Pragma: no-cache\r\n\r\n") # FPS clock clock = time.clock() # 开始流媒体图像 #注:禁用IDE预览以增加流式FPS。 while (True): clock.tick() # 跟踪snapshots()之间经过的毫秒数。 frame = sensor.snapshot() import circle cframe = frame.compressed(quality=100) header = "\r\n--openmv\r\n" \ "Content-Type: image/jpeg\r\n"\ "Content-Length:"+str(cframe.size())+"\r\n\r\n" client.send(header) client.send(cframe) print(clock.fps()) while (True): # 创建服务器套接字 s = usocket.socket(usocket.AF_INET, usocket.SOCK_STREAM) try: # Bind and listen s.bind([HOST, PORT]) s.listen(5) # 设置服务器套接字超时 # 注意:由于WINC FW bug,如果客户端断开连接,服务器套接字必须 # 关闭并重新打开。在这里使用超时关闭并重新创建套接字。 s.settimeout(3) start_streaming(s) except OSError as e: s.close() print("socket error: ", e) #sys.print_exception(e) circle: # 圆形检测例程 # # 这个例子展示了如何用Hough变换在图像中找到圆。 # https://en.wikipedia.org/wiki/Circle_Hough_Transform # # 请注意,find_circles()方法将只能找到完全在图像内部的圆。圈子之外的 # 图像/ roi被忽略... import sensor, image, time sensor.reset() sensor.set_pixformat(sensor.RGB565) # 灰度更快 sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) clock = time.clock() while(True): clock.tick() #lens_corr(1.8)畸变矫正 img = sensor.snapshot().lens_corr(1.8) # Circle对象有四个值: x, y, r (半径), 和 magnitude。 # magnitude是检测圆的强度。越高越好 # roi 是一个用以复制的矩形的感兴趣区域(x, y, w, h)。如果未指定, # ROI 即图像矩形。操作范围仅限于roi区域内的像素。 # x_stride 是霍夫变换时需要跳过的x像素的数量。若已知圆较大,可增加 # x_stride 。 # y_stride 是霍夫变换时需要跳过的y像素的数量。若已知直线较大,可增加 # y_stride 。 # threshold 控制从霍夫变换中监测到的圆。只返回大于或等于阈值的圆。 # 应用程序的阈值正确值取决于图像。注意:一条圆的大小是组成圆所有 # 索贝尔滤波像素大小的总和。 # x_margin 控制所检测的圆的合并。 圆像素为 x_margin 、 y_margin 和 # r_margin的部分合并。 # y_margin 控制所检测的圆的合并。 圆像素为 x_margin 、 y_margin 和 # r_margin 的部分合并。 # r_margin 控制所检测的圆的合并。 圆像素为 x_margin 、 y_margin 和 # r_margin 的部分合并。 # r_min,r_max和r_step控制测试圆的半径。 # 缩小测试圆半径的数量可以大大提升性能。 # threshold = 3500比较合适。如果视野中检测到的圆过多,请增大阈值; # 相反,如果视野中检测到的圆过少,请减少阈值。 for c in img.find_circles(threshold = 2500, x_margin = 10, y_margin = 10, r_margin = 10,r_min = 2, r_max = 100, r_step = 2): img.draw_circle(c.x(), c.y(), c.r(), color = (255, 0, 0)) print(c) print("FPS %f" % clock.fps())
-
改代码,不是直接粘贴。