怎么解决这个对象不可迭代问题啊?
-
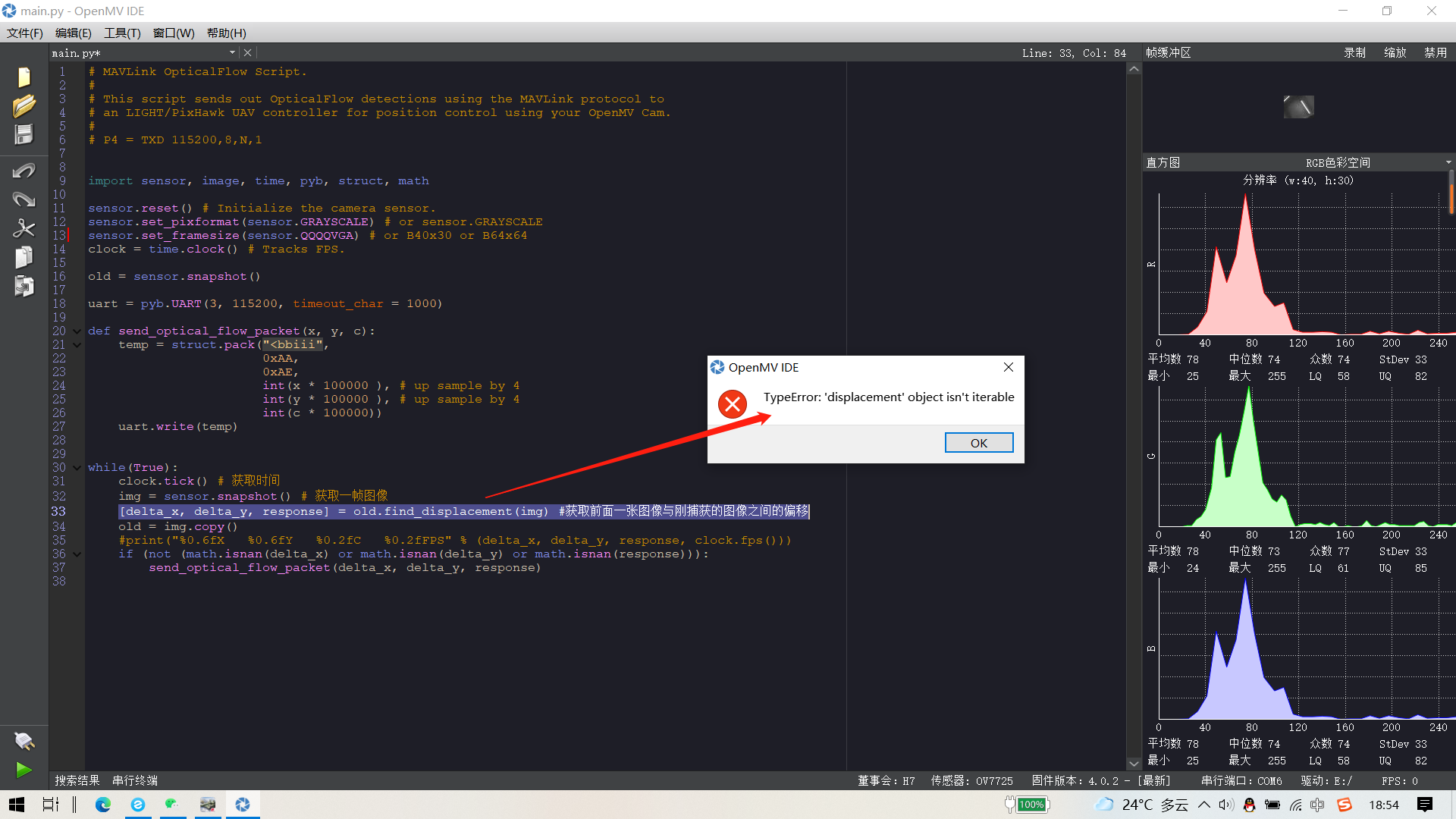
# MAVLink OpticalFlow Script. # # This script sends out OpticalFlow detections using the MAVLink protocol to # an LIGHT/PixHawk UAV controller for position control using your OpenMV Cam. # # P4 = TXD 115200,8,N,1 import sensor, image, time, pyb, struct, math sensor.reset() # Initialize the camera sensor. sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.GRAYSCALE sensor.set_framesize(sensor.QQQQVGA) # or B40x30 or B64x64 clock = time.clock() # Tracks FPS. old = sensor.snapshot() uart = pyb.UART(3, 115200, timeout_char = 1000) def send_optical_flow_packet(x, y, c): temp = struct.pack("<bbiii", 0xAA, 0xAE, int(x * 100000 ), # up sample by 4 int(y * 100000 ), # up sample by 4 int(c * 100000)) uart.write(temp) while(True): clock.tick() # 获取时间 img = sensor.snapshot() # 获取一帧图像 [delta_x, delta_y, response] = old.find_displacement(img) #获取前面一张图像与刚捕获的图像之间的偏移 old = img.copy() #print("%0.6fX %0.6fY %0.2fC %0.2fFPS" % (delta_x, delta_y, response, clock.fps())) if (not (math.isnan(delta_x) or math.isnan(delta_y) or math.isnan(response))): send_optical_flow_packet(delta_x, delta_y, response)
-
https://book.openmv.cc/example/22-Optical-Flow/differential-translation.html
参考这个正确代码。33行不能这么用。