舵机云台例程为什么有不能跟随的角度区域
-
用的云台例程控制996舵机 已经调零 但是大概有90°的区域无法跟随
我看视频教程上也有这个问题 有解决的大哥吗 能给说说咋回事吗
-
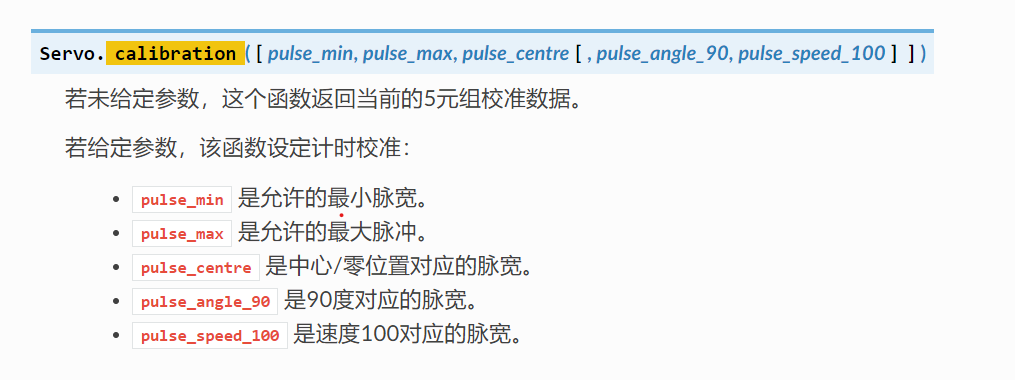
主要看一下最大脉宽值和最小脉宽值。代码里设置一下。
https://github.com/SingTown/OpenMV-Pan-Tilt/blob/master/pan-tilt/src/main.py#L9
-
@kidswong999 老师
1.是不是这个舵机角度从0-180而非-90—90 所以pulse_centre和pulse_min都为500
2.是不是虽说是PID但是并没有加入KD哎
-
舵机的参数和PID的参数没有任何关系。
舵机的参数,完全是因为厂家不一样,所以脉宽的数值不一样。
-
@kidswong999 老师
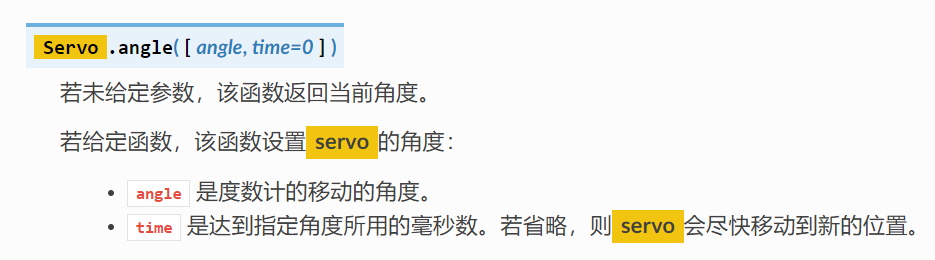
1.这个返回的角度是受最大最小脉宽影响吗,还是直接返回通用的准确的角度
2.这个返回的角度具体是哪个角呢 是-90—90中偏离0°的角还是 0-180偏离0°的角呢